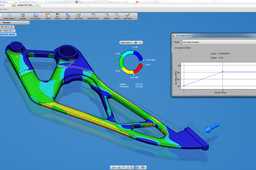
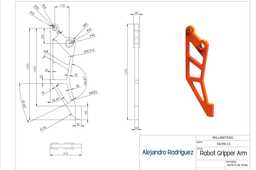
欧特克公司机器人手爪臂设计的挑战。第一次设计
**********************************************************
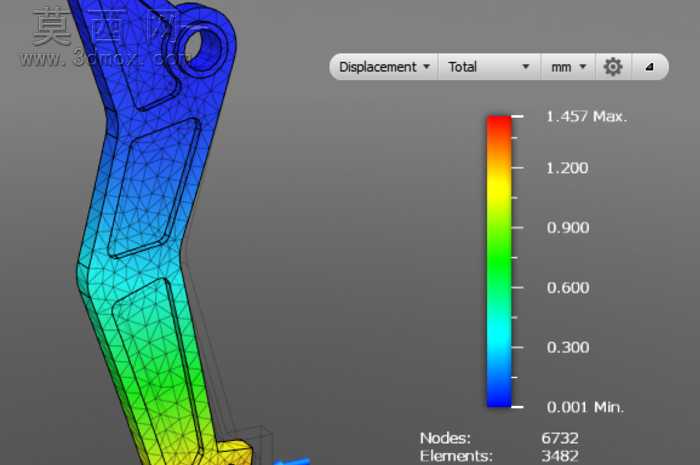
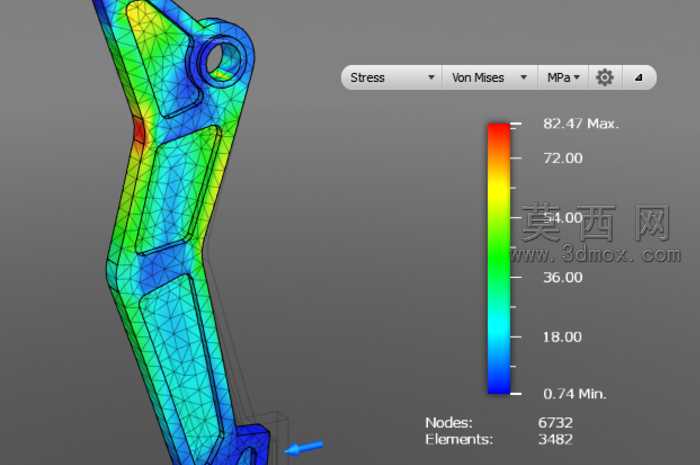
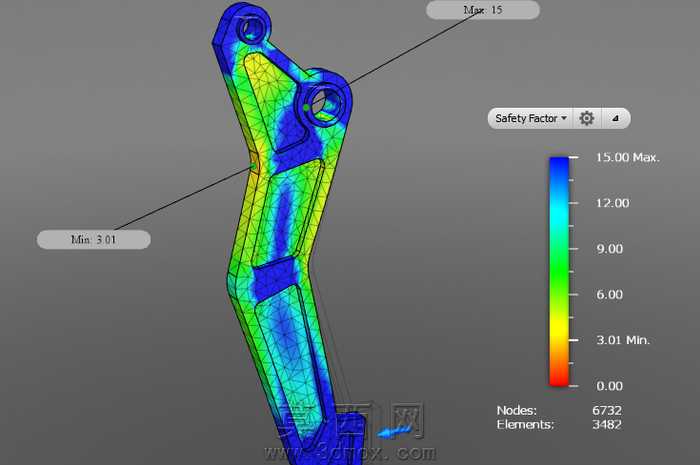
结果:
大体积 = 60.17 公斤
最大值。应力 (Von Mises) = 82.47 MPa。
最大位移 = 1.457 毫米
最小安全系数 = 3.01。
**********************************************************
第一次设计。
顺便说一句,作为一个应力分析师和机械设计师我爱欧特克 sim 360 卡!!!
标签:


- 模型大小 :1.6 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :