机械臂夹具


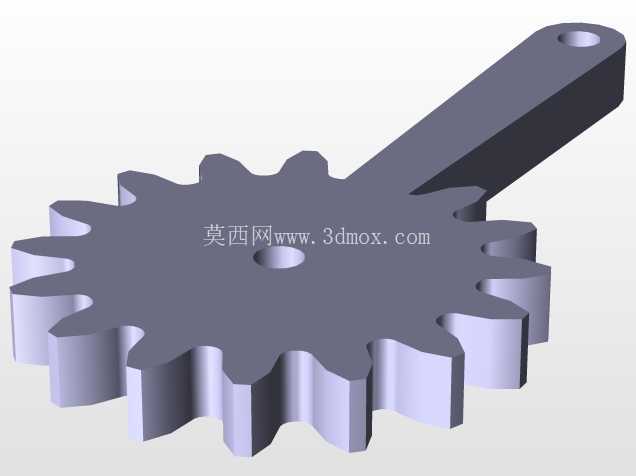
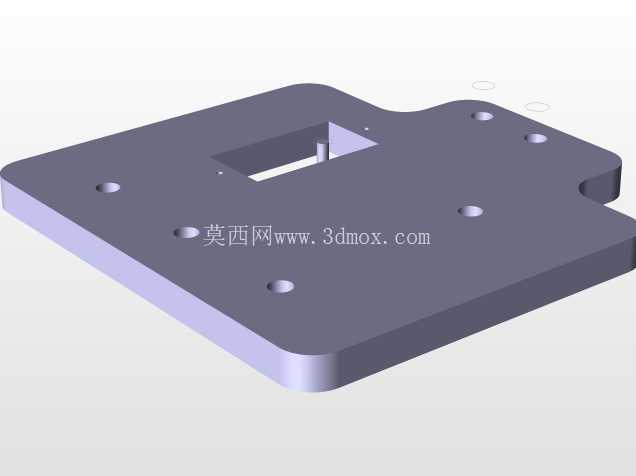
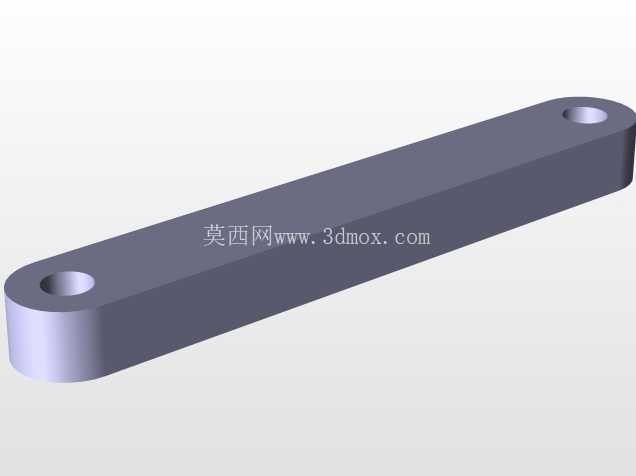
该夹具用作 4 d.o.f. 的末端执行器。机器人手臂,由SG90 MicroServo电机驱动。产品设计包括电机模型和CATIA V5中的Mechanism应用程序,可以可视化伺服转动时夹具的运动。这是专为 2D 激光切割而设计的,已成功应用于 4mm 木饰面。与 Juan Manuel Marredo Píriz 共同设计(参见 Linkedin: https://www.linkedin.com/in/juan-manuel-marredo-pC3ADriz-b89715130/ )。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :CATIA