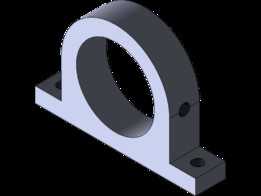
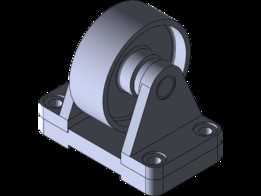
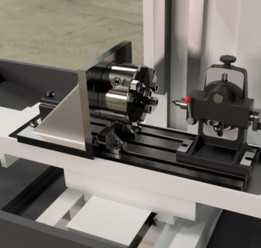
使用谐波驱动器和角板的 CNC 第 4 轴
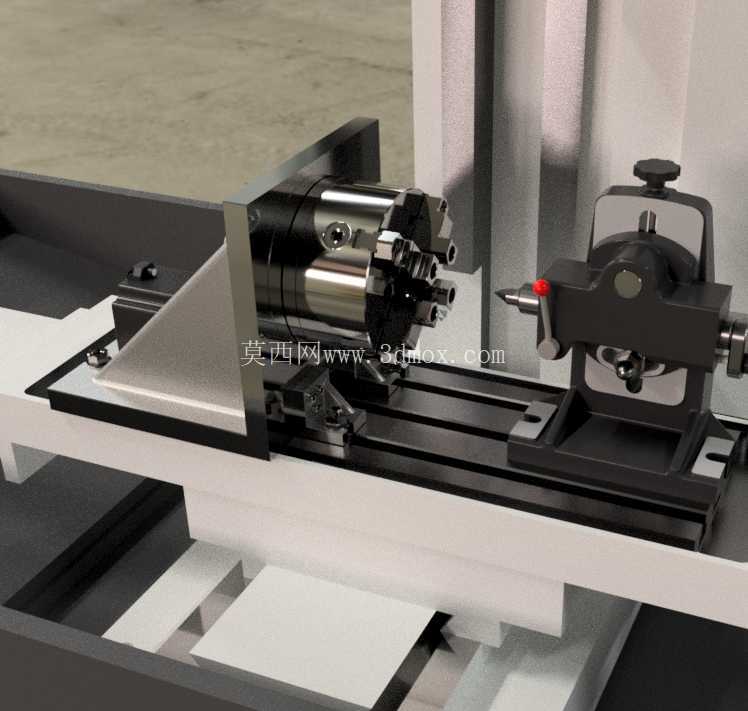
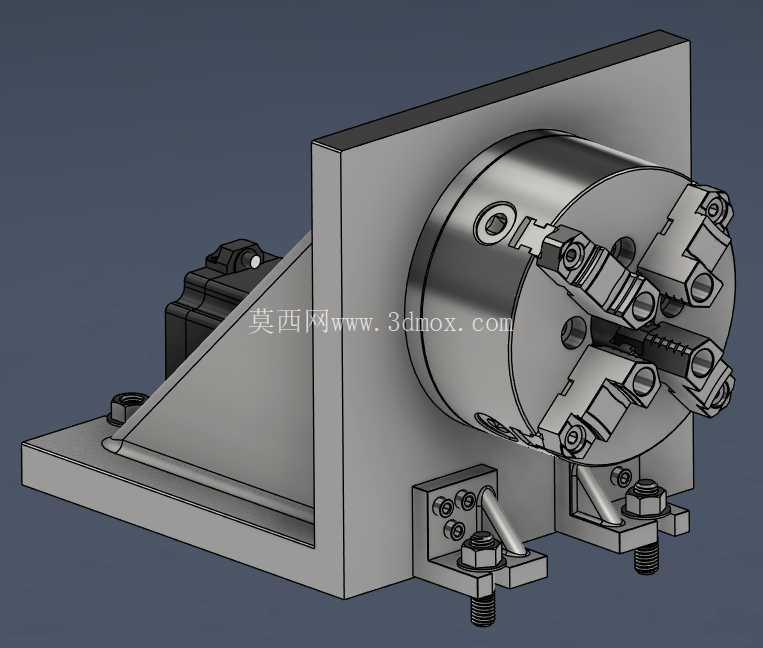
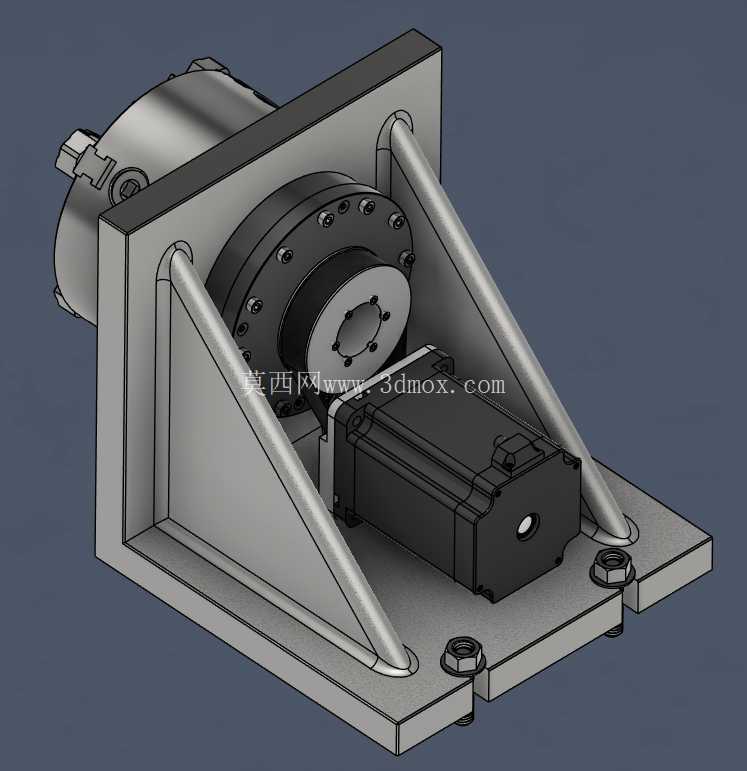
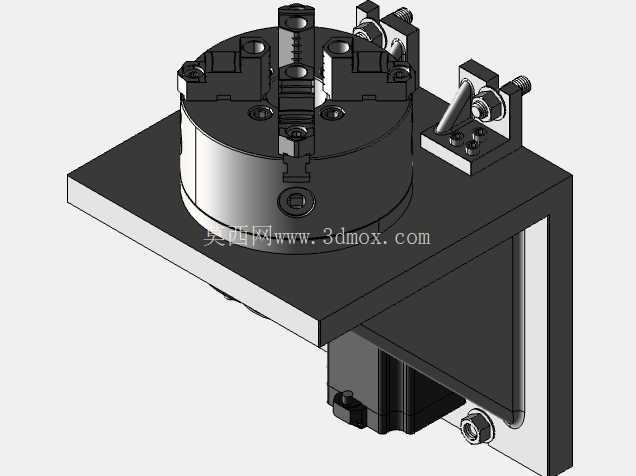
这是一种低成本(约 600 美元)DIY 第四轴设计,通过使用现成的精密磨口铸铁角板来最大限度地提高精度。 铸铁还具有作为出色减振器的优点。该设计是针对 Tormach 1100 床身规格而设计的,并且高度适合其“高”尾座。我想要一个没有间隙的强大第四轴。 6 轴机器人手臂上使用的应变波齿轮箱似乎非常适合此应用,但它们的扭转刚性特别强。 为了增加刚度,我使用了更大的“32”尺寸 Harmonic Drive 变速箱。 (“25”尺寸刚度的 2 倍,“20”尺寸刚度的 4 倍)使用的单位约为 300 美元。对于框架,我希望最大限度地降低成本并最大限度地提高精度。 我找到一块 10" x 10" 角板,售价 130 美元。 我的角板中的肋骨比我从 Shars 下载的模型中的肋骨更窄,因此此设计也适用于较窄的 160mm 间隔肋板模型(但您必须深钻孔一些间隙。)使用 50:1 减速齿轮箱和 2:1 减速滑轮该机器每转将产生 20,000 步或每步 0.018 度。 在最大速度下,该机器将在卡盘处产生约 10rpm 的转速。该机器的总质量约为 36 千克或约 79 磅。Harmonic Drive shg-32-50-2uh"32" 尺寸,50:1 齿轮减速4.5 千克质量(Ebay 或 经销商新品)Nema 34 步进电机(8.5Nm)5.5kg 质量(任何来源)5M 50T 定时 皮带轮https://www.amazon.com/dp/B0BGF3M7G55M 25T同步皮带轮https://www.amazon.com/dp/B09BFB8K
K9365T 5M 同步带 https://www.amazon.com/dp/B09KBN4NF110"x10" 平角板 23.85kg 质量 cme-tools.com 价格优惠 两个 2"x2" 平角板 0.78kg 质量 https://www.amazon.com /dp/B00N40Y5T0


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering