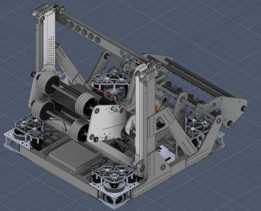
#6431 NoktaParantez 2024 FRC 竞赛机器人
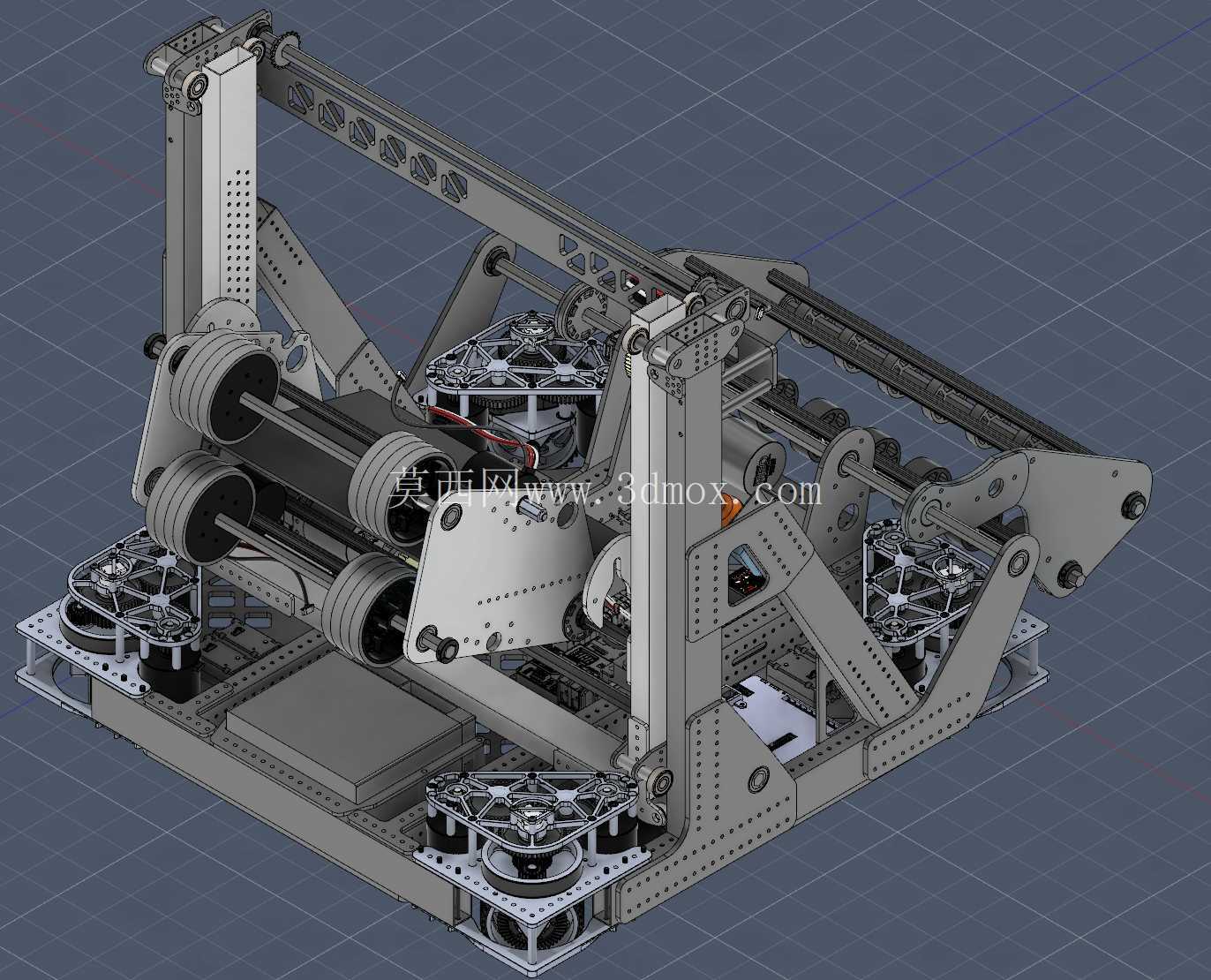
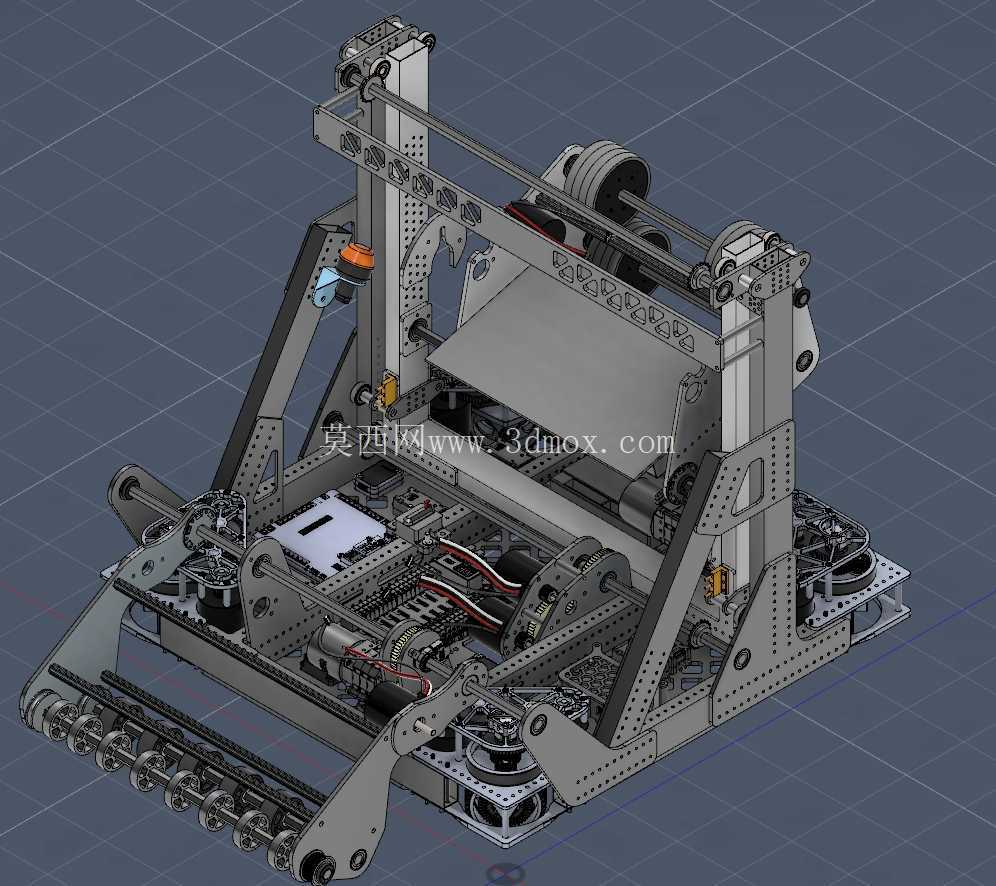
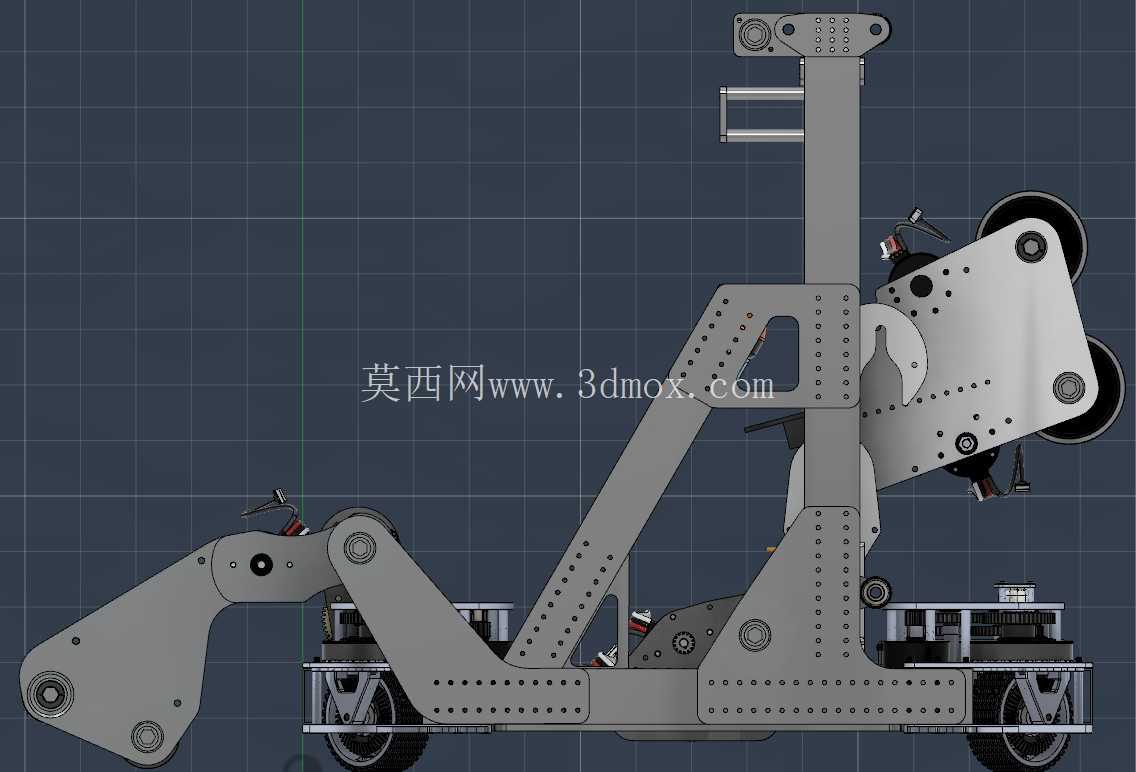
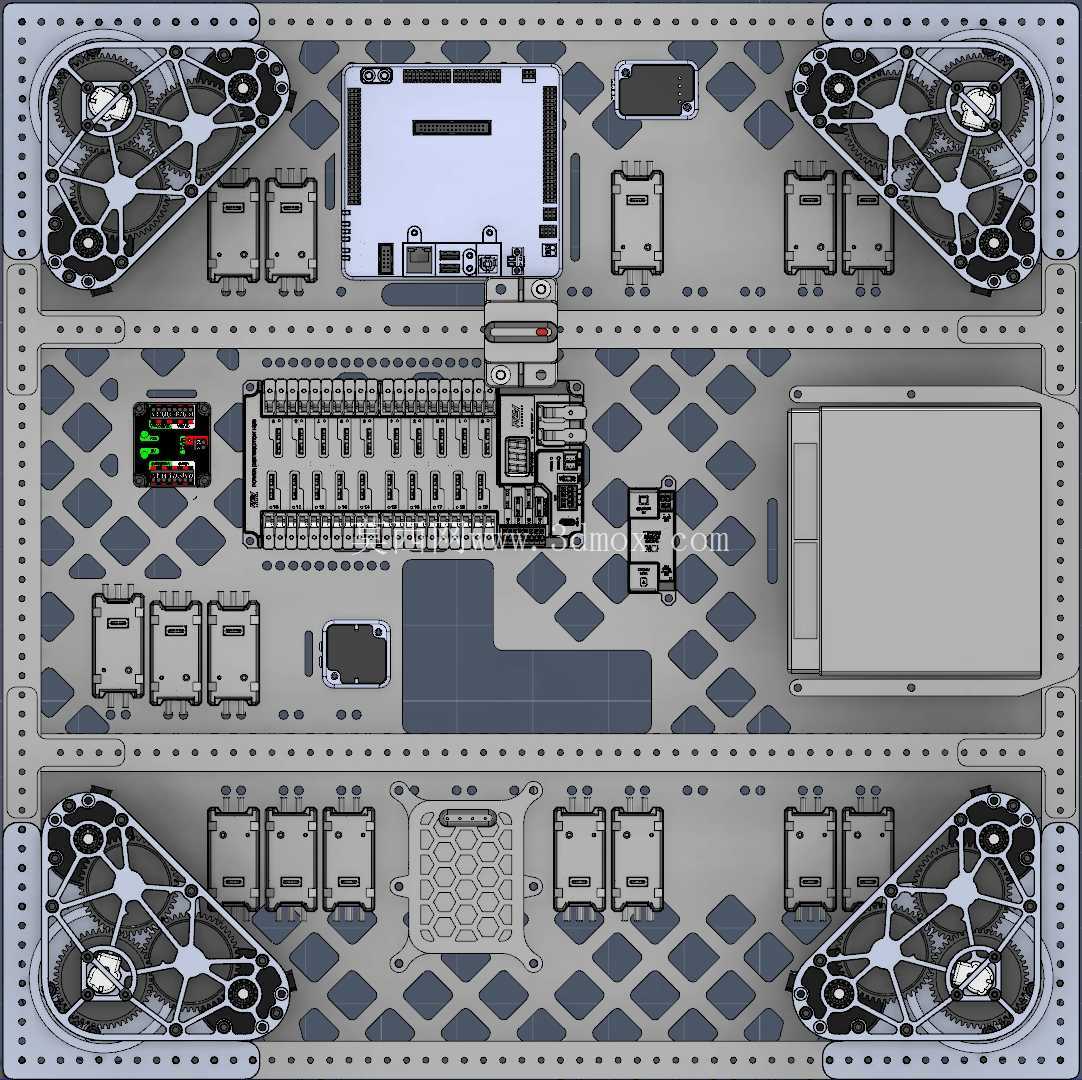
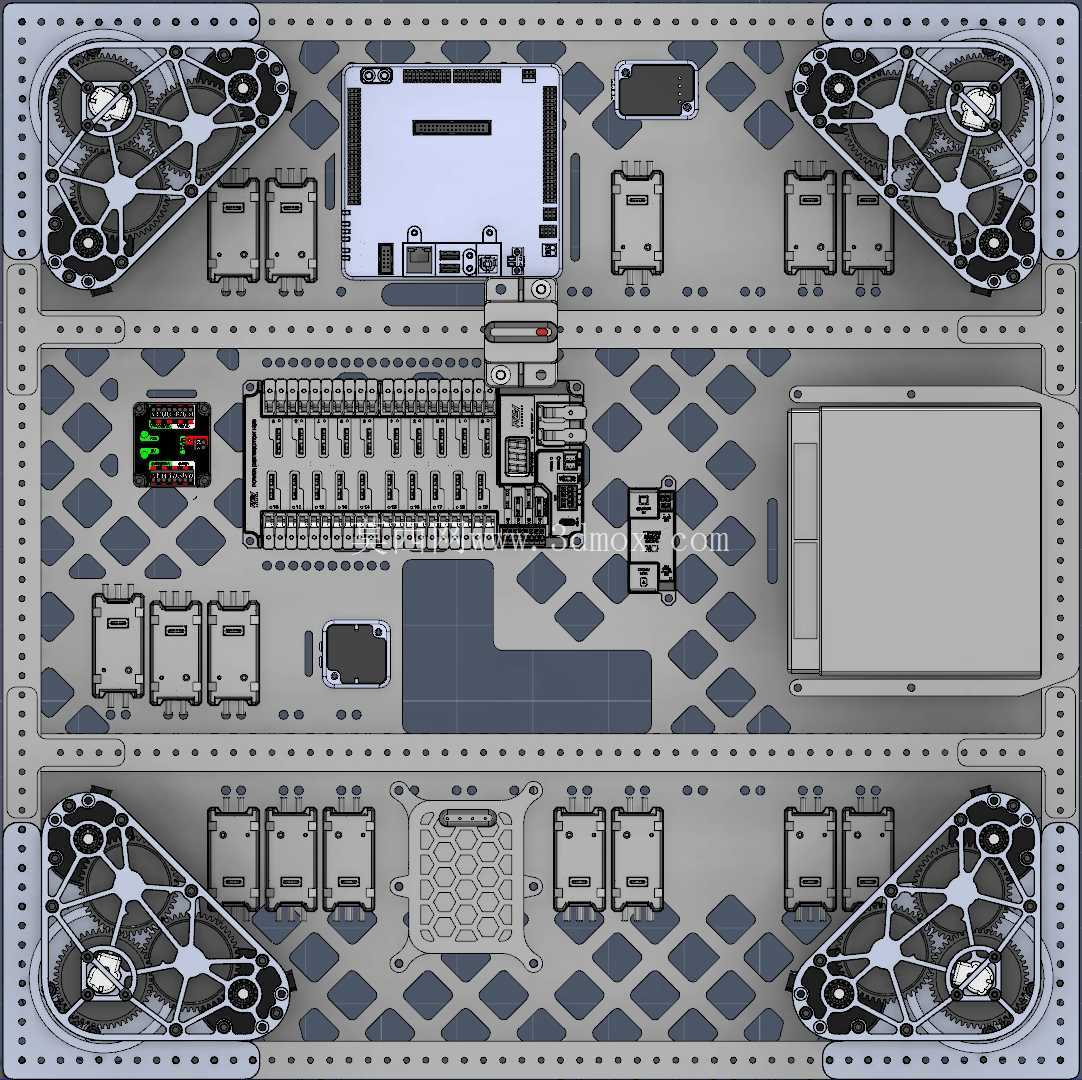
底盘:我们的机器人的基础是 28x28 英寸底盘,其设计着眼于在 2024 年比赛的开阔场地上实现最佳平衡性和机动性。 它配备了 SDS MK4i 转向模块,具有 L2 齿轮比并由 NEO 电机提供动力。 底盘设计包括精心布置的插槽,方便布线,蜂窝图案的腹盘有助于组织电子元件,同时降低重心以提高稳定性。 进气进气系统直接受到“蔓越莓警报”RI3D 团队设计的启发,但进行了改编 以满足我们机器人的特定要求。 进气板由聚碳酸酯制成,用我们的 CNC 铣床切割,并用铝加固,以加强被确定为潜在薄弱点的区域。 入口枢轴上的“REV 通孔编码器”可确保精确控制,从而准确处理游戏棋子。 电梯:我们的电梯系统借鉴了“Thrifty Elevator”设计的简单性和高效性。 它配备了减速比为 40:1 的变速箱,无需棘轮系统,同时在赛后将机器人牢固地悬挂在链条上。 该设计包括带有向内槽的挂钩,以确保安全稳定的攀爬。 精确的运动由变速箱输出轴上的“REV 通孔编码器”控制。 射手:通过测试,我们确定上下式射手在一致性和射程方面是最可靠的。 这位射手是
由两个 NEO 电机驱动,通过皮带传输动力。 射击器的枢轴由连接到 MAX 行星齿轮箱的 NEO 电机提供动力,可快速改变齿轮比(如有必要),从而可以快速调整射击角度。 射手枢轴上的“REV通孔编码器”提供了根据目标距离调节角度所需的精度。 材料和制造技术:机器人的结构主要由6061铝合金型材和5052和6061板材制成,形成了 框架既坚固又轻便。 所有板材均采用半哑光黑色阳极氧化处理,以提高美观性。 制造工艺涉及精密铣削和水射流切割,板材组件厚度标准化为4毫米和6毫米。 团队 6431 NoktaParantez。)


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering