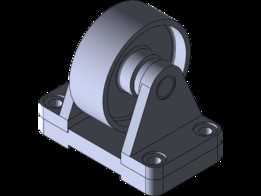
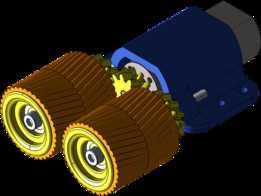
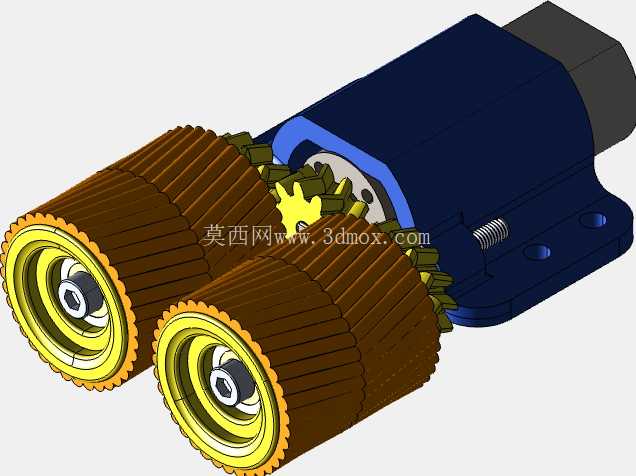
人字齿轮\u0026轮组件
该设计采用了与电机轴相连的人字形驱动齿轮。 该组件还包括两个轮子,轮子采用人字形齿轮延伸设计。该设计主要针对最快的巡线机器人轮组件。 这种单电机两轮设??计增强了快速巡线机器人的稳定性和更好的牵引力。由于速度是这里的主要考虑因素,因此齿轮比不会降低太多(即:1.25:1)。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES

该设计采用了与电机轴相连的人字形驱动齿轮。 该组件还包括两个轮子,轮子采用人字形齿轮延伸设计。该设计主要针对最快的巡线机器人轮组件。 这种单电机两轮设??计增强了快速巡线机器人的稳定性和更好的牵引力。由于速度是这里的主要考虑因素,因此齿轮比不会降低太多(即:1.25:1)。