UR3笔筒
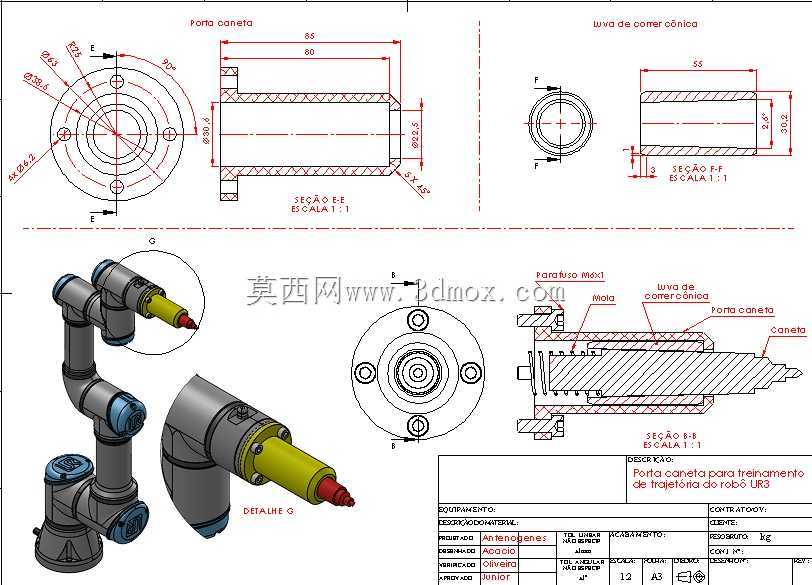



专为 3D 打印而开发的笔架。可用于优傲机器人机器人的轨迹训练。其想法是在操作员尚不具备延迟轨迹能力的训练过程中保留笔尖。Porta caneta desenvolvido para impress?o 3D .pode ser usado para treinamento de trajetória do rob? da Universal Robot.A ideia and preservar a ponta da caneta durante treinamentos onde o 操作员 ainda n?o tem habilidade em gravar trajetórias.https://www.linkedin.com/posts/antenogenes-ac%C3%A1cio-oliveira-junior-54b81334_treinamento-de-programa%C 3%A7%C3%A3o-de-rob%C3%B4-colaborativo-activity-7234537068629024768-OmGF?utm_source=share&utm_medium=member_desktop


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Parasolid,STEP / IGES,Rendering