FRC 1922 - 2024 Swerve 驱动底座
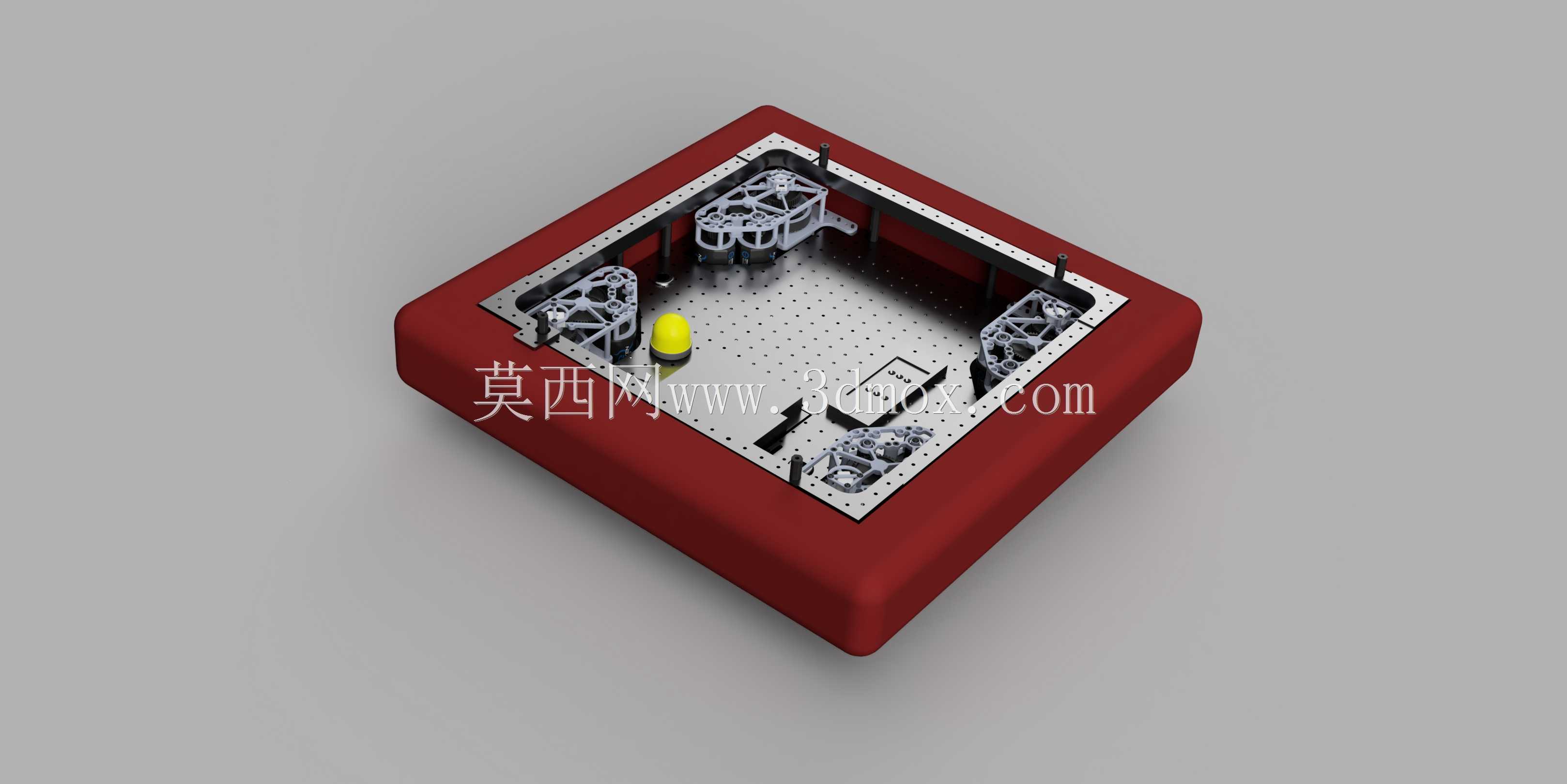

2024 年赛季是我们第一次使用转向驱动,从中我们学到了很多东西,同时意识到还有很多东西需要学习。 在这个休赛期设计和建造转向驱动基地的项目中,我们花时间探索了一些事情。 利用 Swerve Drive Specialties MK4n 模块将电气组件安装在“底部” 在 Fusion360MK4n 模块中创建参数化 CAD 模型。 虽然 MK4i 模块非常出色,但在尝试定位电子元件时,它们给我们带来了巨大的挑战。 虽然三角形非常紧凑且灵活(可以进入任何角落),但由于电子元件是矩形的,最终会浪费大量空间。 认识到需要 A 和 B 模块的矩形转向模块的缺点后,我们认为更好的电子布局的好处超过了需要配对转向模块的成本。 底部电气元件。 我们注意到许多团队将其电气元件安装在机器人的“底部”。 换句话说,访问组件需要将机器人转向一侧。 虽然必须将机器人侧向才能接触电子设备似乎是一个缺点,但这可能并没有那么糟糕。 在传统设计中,电气元件深埋在机器人内部,一旦安装了游戏子系统,从顶部进入就完全是一场噩梦。 访问 Robo
为了使 rio 更容易,我们将延长电缆连接到易于访问的“控制面板”,以便程序员可以在需要时更新 Rio。通过 CAD 驱动器底座的过程,我们发现了一个似乎可以让生活变得更轻松的技巧。 如果其他人对如何做得更好有不同的方法或反馈,我很乐意听取他们的意见。 我们尝试制作仅包含一个草图的文件。 我们称它们为“切口”。 例如,我们可能会绘制电机的孔图案。 草图可能有一些附加的几何图形,显示组件(例如电机)的边界。 每当我们布置需要连接电机的板时,我们可以在板中电机轴的中心放置一个点,然后插入电机模板并使用融合接头将其定位在正确的位置。 拉伸命令允许您拾取电机模板中的孔以切割主机图纸中的板。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,Fusion 360,STEP / IGES