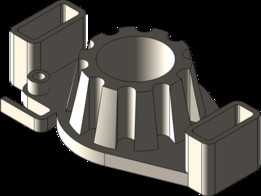
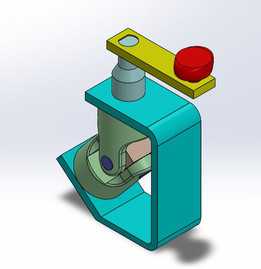
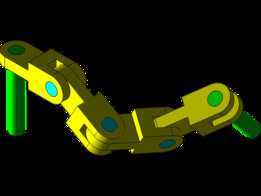
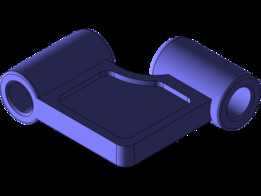
4自由度机械臂
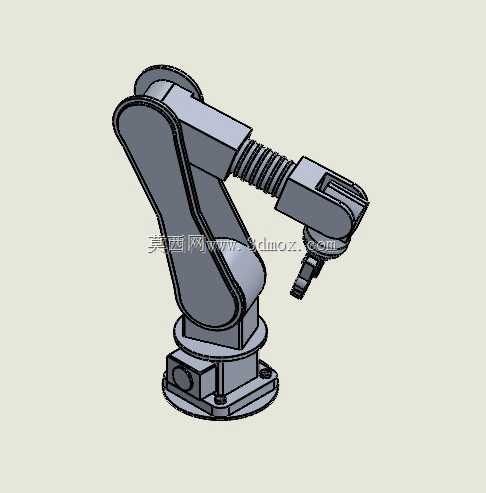

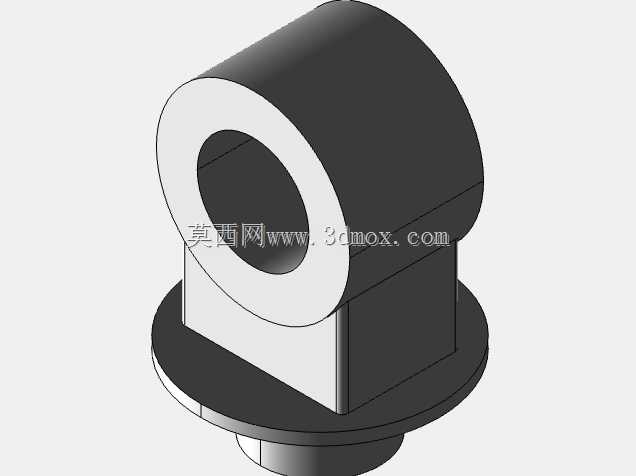
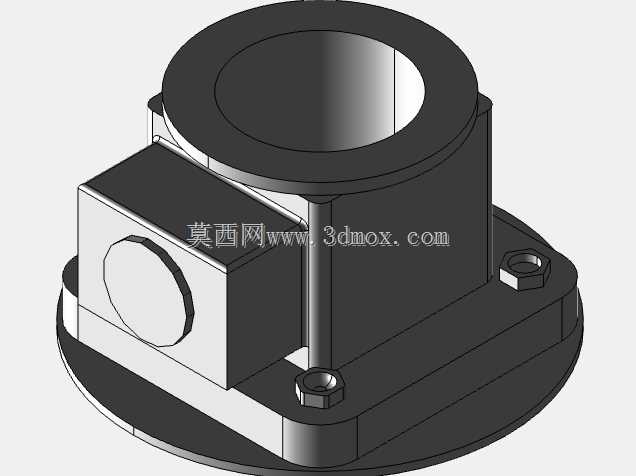


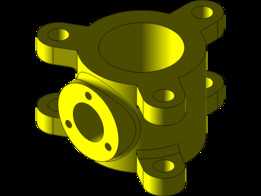
推出专为高效拾取和放置操作而设计的 4 自由度 (4DOF) 机械臂,最大工作范围为 400 毫米。该机械臂采用 SolidWorks 建模,可提供精确的运动和灵活性,非常适合各种工业和教育应用。该机械臂配备三个旋转关节,可在三维空间中实现多功能定位和机动性。它包括一个专门设计的夹具作为末端执行器,使其能够安全地抓取和操纵各种物体。轻巧耐用的结构确保高效操作,而集成夹具增强了其在装配线、仓库和教育中搬运物品的功能。设置。下载 SolidWorks 模型以探索其设计和功能。我们欢迎社区的合作和反馈,以进一步增强该项目。规格:自由度:4最大范围:400毫米末端执行器:Gripper建模软件:SolidWorks加入我们推进机器人技术!
------分隔线----------------------------
- 上一篇:Epoxi SM
- 下一篇:功能安排a3evp - mvd-pika

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,Snagit