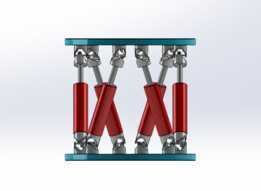
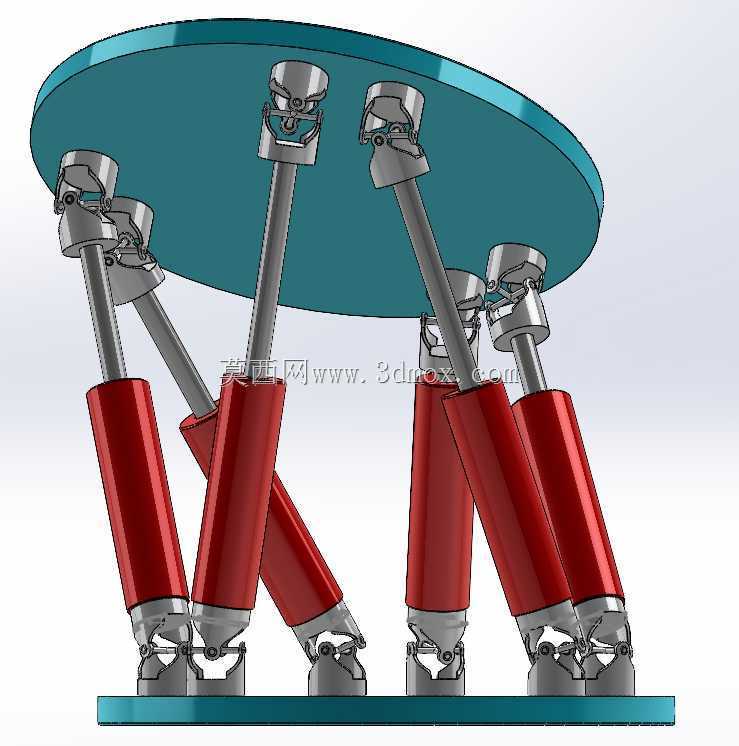
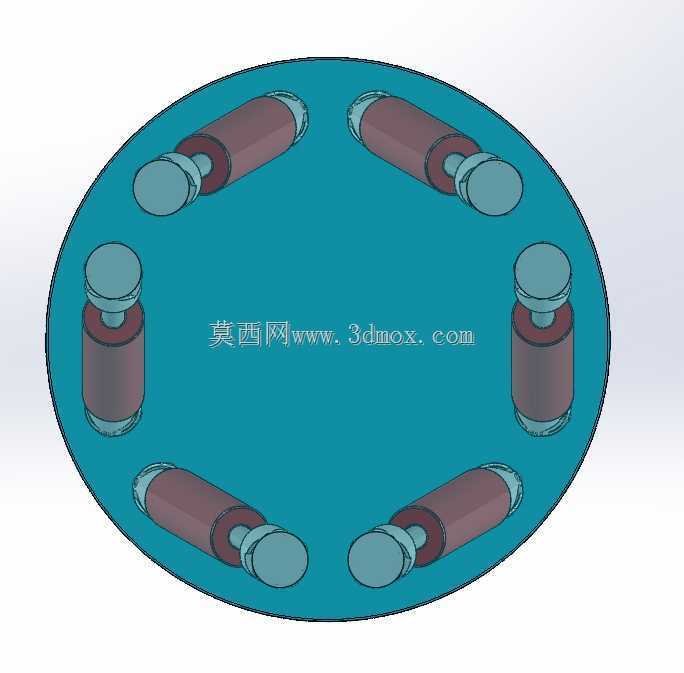
斯图尔特平台
斯图尔特平台机构被归类为并行机器人,利用六个棱柱形执行器,通常是液压千斤顶。 该机构允许连接到其顶板的设备在所有六个自由度 (DOF) 上自由移动。Stewart 平台能够提供三个线性自由度和三个旋转自由度,由于其多功能工作空间,在各个领域都有应用。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering


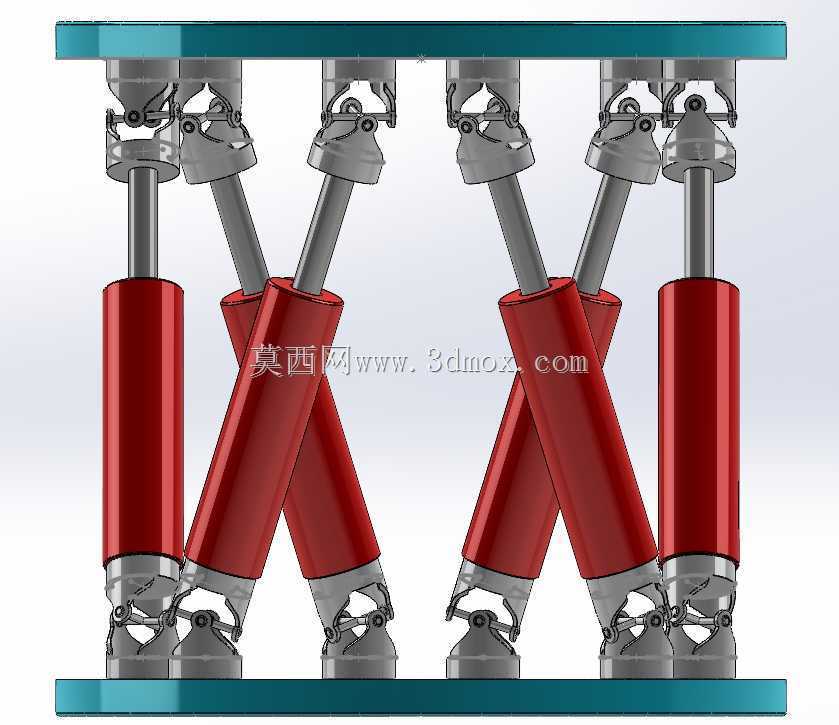

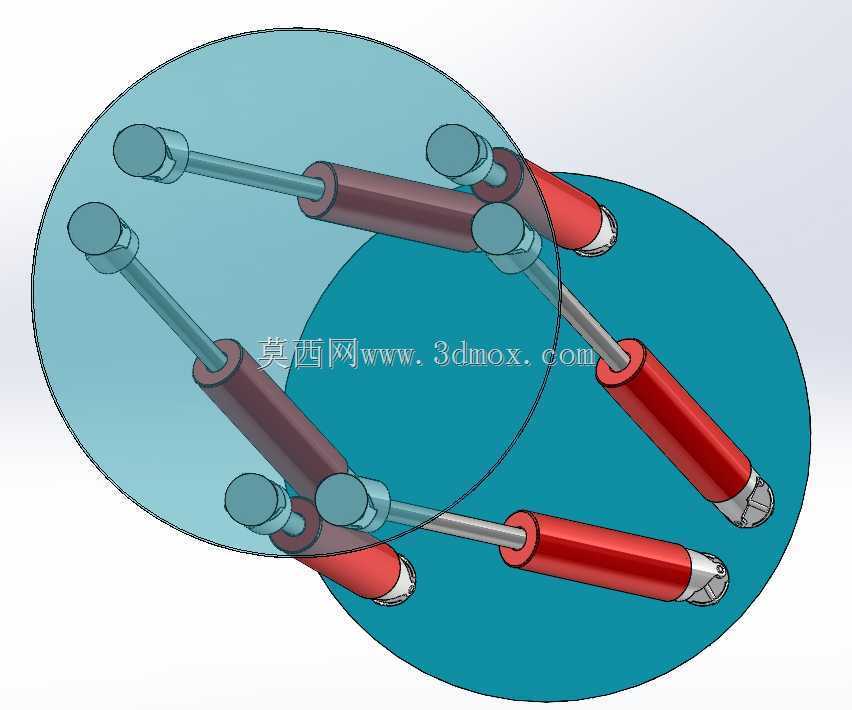

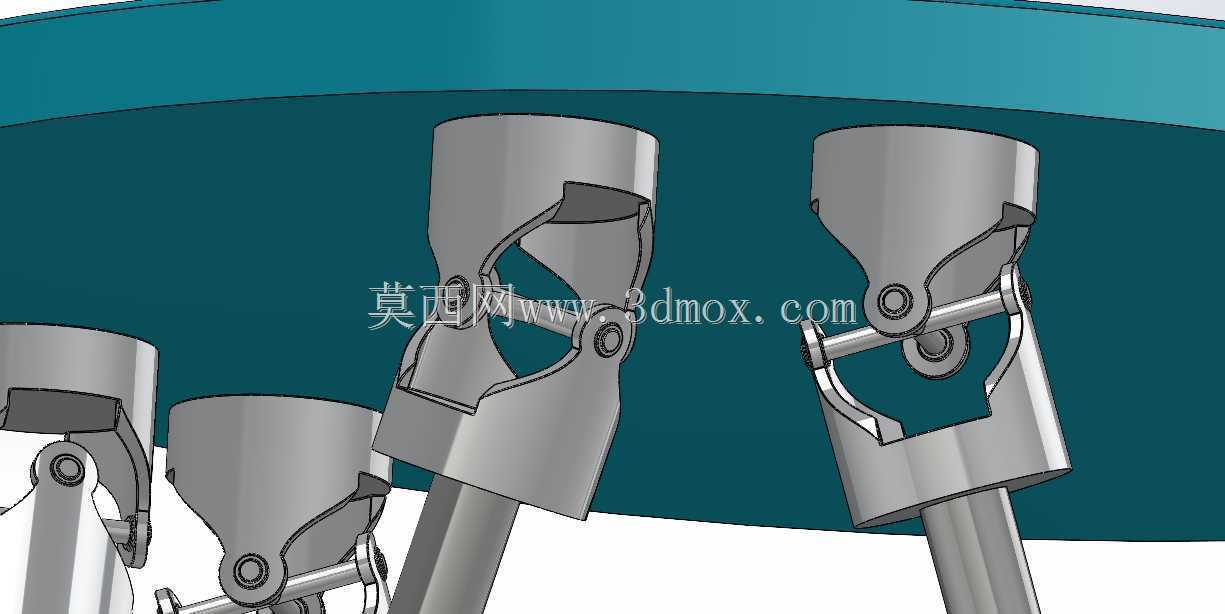
斯图尔特平台机构被归类为并行机器人,利用六个棱柱形执行器,通常是液压千斤顶。 该机构允许连接到其顶板的设备在所有六个自由度 (DOF) 上自由移动。Stewart 平台能够提供三个线性自由度和三个旋转自由度,由于其多功能工作空间,在各个领域都有应用。