自行车驱动实验样品架
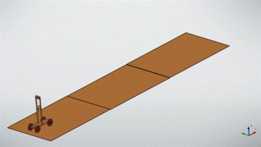
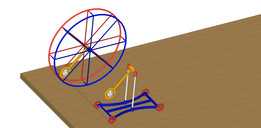
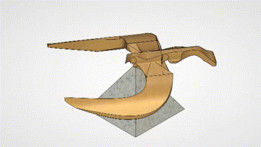
开发了一种扁平肌肉驱动机构,包括两个同步曲柄L1、L2(在实验样品中,曲柄运动的同步是通过链条传动实现的)和枢轴连接到它们的踏板元件LP。 踏板元件通过第一曲柄通过旋转运动副连接,而第二曲柄通过更高的运动副(弧形或通过滚子 - 通过圆柱平面副)连接。 通过改变曲柄之间的角度来实现踏板元件轨迹的调节。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering












开发了一种扁平肌肉驱动机构,包括两个同步曲柄L1、L2(在实验样品中,曲柄运动的同步是通过链条传动实现的)和枢轴连接到它们的踏板元件LP。 踏板元件通过第一曲柄通过旋转运动副连接,而第二曲柄通过更高的运动副(弧形或通过滚子 - 通过圆柱平面副)连接。 通过改变曲柄之间的角度来实现踏板元件轨迹的调节。