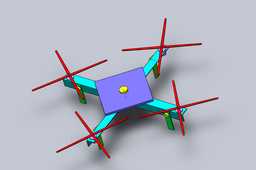
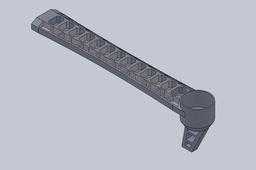
虹膜四轴飞行器的手臂
这是我模仿一只手臂基于虹膜四轴飞行器。
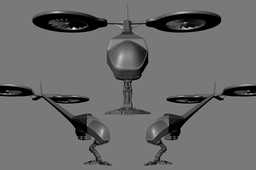
我用了一个有限元分析项目。
目标是要确定共振频率,看看其中任何重叠操作频率由马达驱动的。
* *我强调,它是基于虹膜的手臂。
我访问有限的实际模型,主要是工作的照片。
这是球公园。


- 模型大小 :2.34 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :

这是我模仿一只手臂基于虹膜四轴飞行器。
我用了一个有限元分析项目。
目标是要确定共振频率,看看其中任何重叠操作频率由马达驱动的。
* *我强调,它是基于虹膜的手臂。
我访问有限的实际模型,主要是工作的照片。
这是球公园。