6个由爱好伺服电动机制成的轴机器人
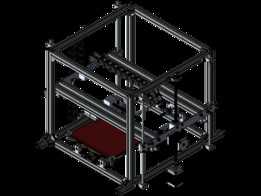
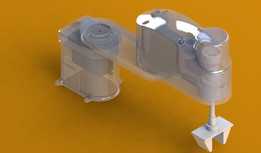
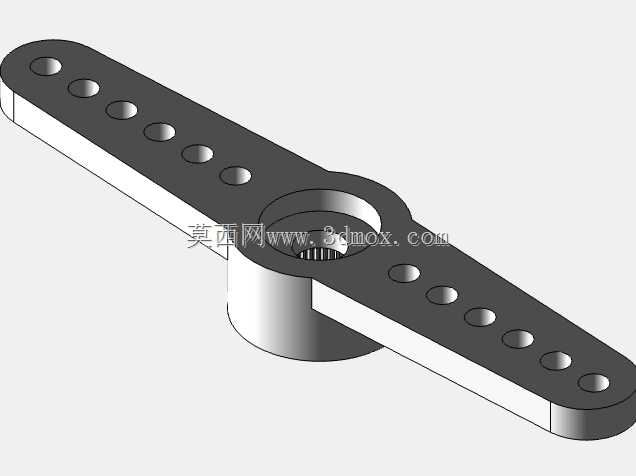
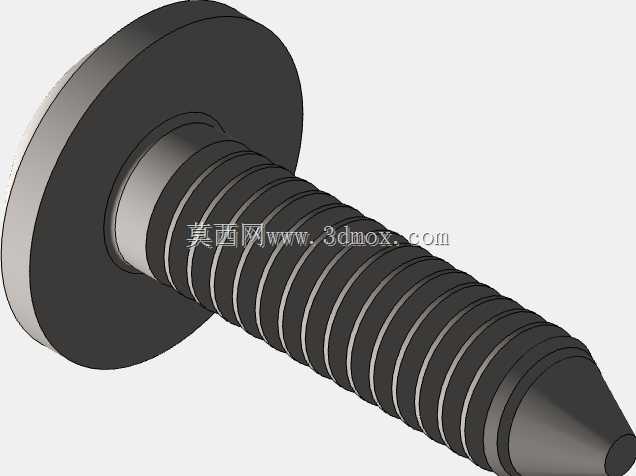
由 3D 打印部件和常规伺服电机制成的 6 轴机器人。由于这是我的旧设计之一,因此需要进行一些小调整,但无论如何它都能正常工作。顺便说一句,我没有画出伺服电机,只是画了 3D 打印部件。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering






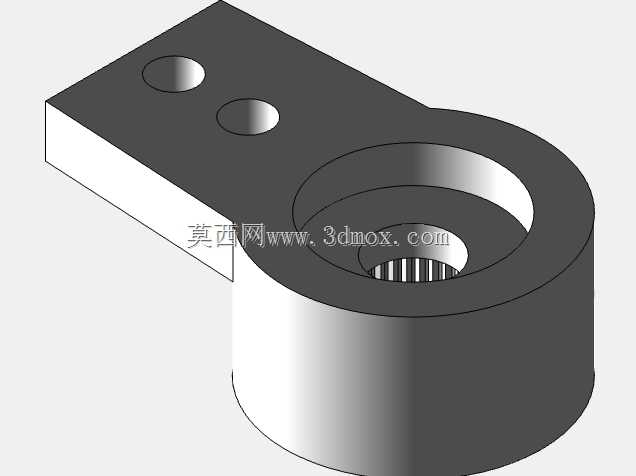
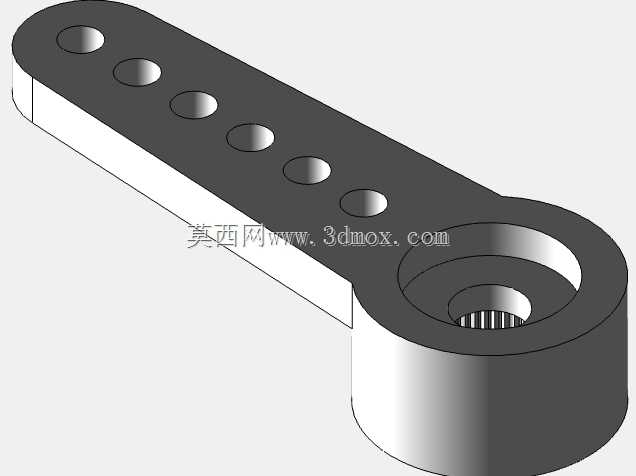

由 3D 打印部件和常规伺服电机制成的 6 轴机器人。由于这是我的旧设计之一,因此需要进行一些小调整,但无论如何它都能正常工作。顺便说一句,我没有画出伺服电机,只是画了 3D 打印部件。