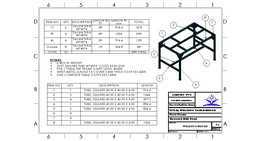
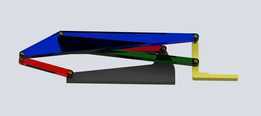
机器人臂



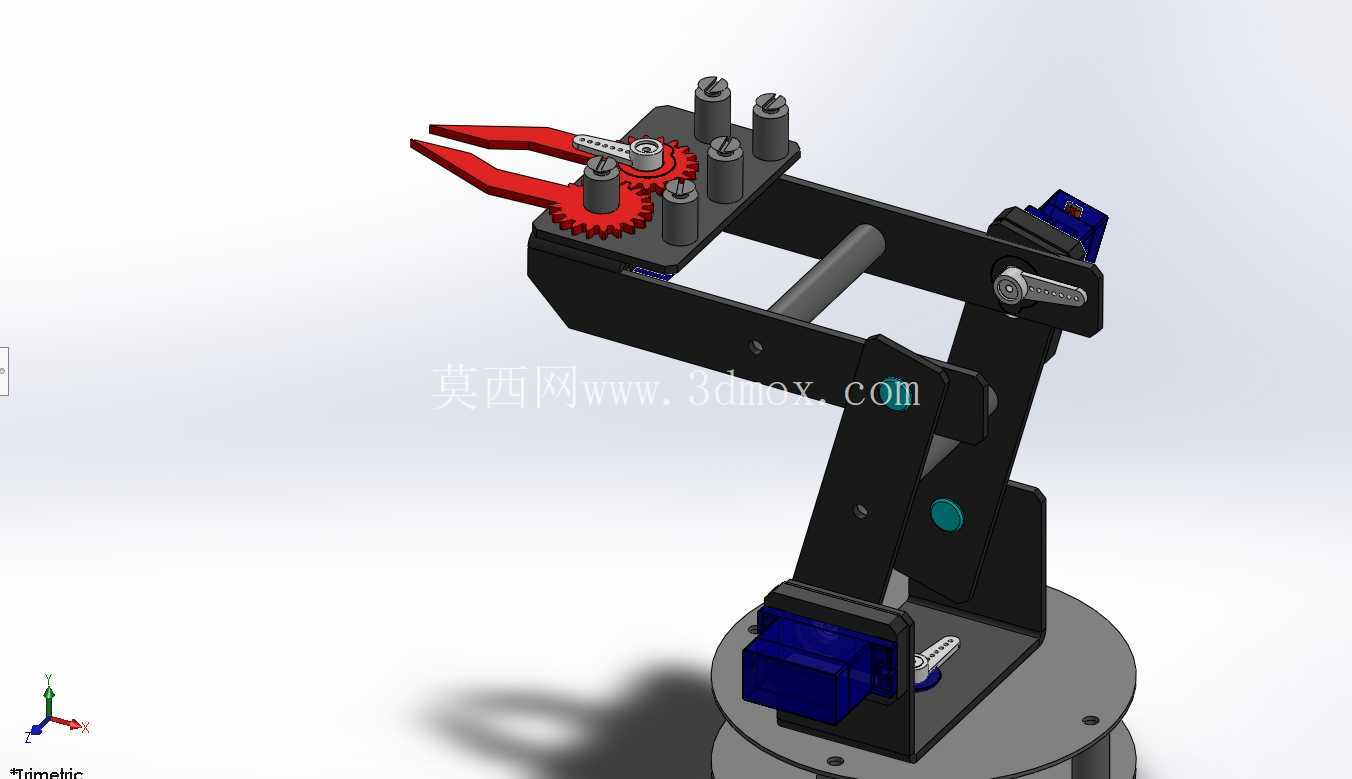

该模型具有多功能且精确的机器人手臂,专为工业和研究环境中的各种自动化任务而设计。该手臂采用多自由度设计,为搬运、装配、焊接或材料转移提供了卓越的灵活性和准确性。该设计采用了坚固的关节和执行器,以确保平稳、可靠的运动和高负载能力。无论您是将这款机器人手臂集成到生产线中还是将其用于实验目的,其先进的设计和耐用的结构都使其成为任何自动化设置的宝贵补充。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,Snagit,STEP / IGES