工程项目的动态系统

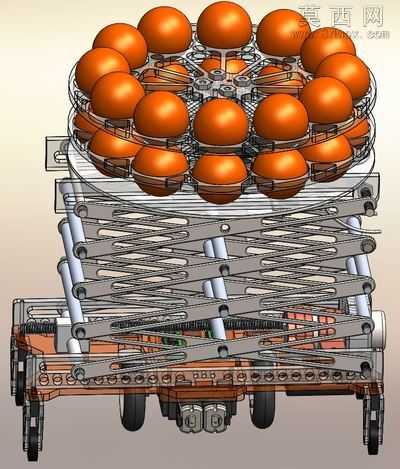

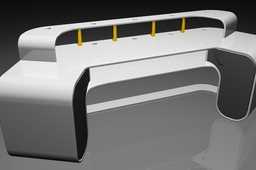
这是教育的时间的做了大量在我前一学期,在大急流城 MI GVSU 中的一个项目。其机器人由电池组供电和控制的 atmega644p 微控制器 (aka MW3 板,aka 的忍者) 机器人使用距离感应器,开车到一堵墙大约 30 英寸高,然后使用剪式升降机到威浮球抬起、 检测孔,并免除每个洞中的 2 球。此 CAD 设计不能显示的某些以后被投入的红外传感器。机器人上的几乎所有内容在从头 solidworks 中创建,然后对哈斯数控铣出。微控制器被派使用 C.


- 模型大小 :87.5 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :