Small Stubby(最终项目)



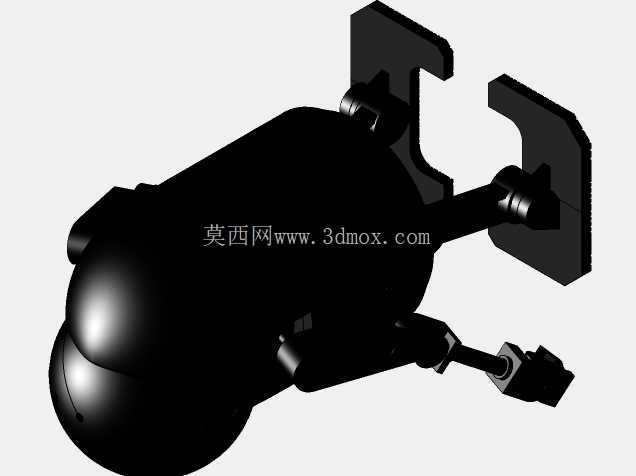
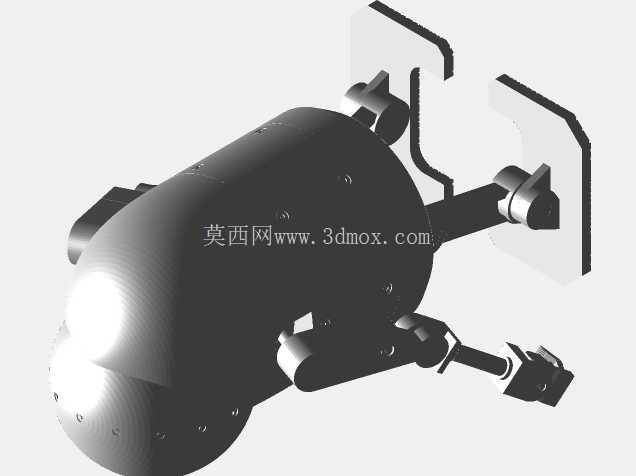










对于这个项目,我建模了《尼尔:机械纪元》中 Small Stubby 的简化版本;它的设计类似于一个发条玩具机器人。我选择这个主题是因为我喜欢这个游戏,而且它很可爱。机器人可以向前行走,但不能沿垂直轴旋转;可以通过运行“腿部运动研究 - 第 1 部分”来观察一般运动,并将左腿脚内的组件接地。一条腿由 3 个主要部分组成:大腿、小腿和脚;它们一起,就像一个膝盖位置较高的人脚。脚也被分成两半,这样它就可以弯曲。它也可以像人类一样移动双手,可以通过运行“手臂运动研究”(针对上臂和前臂)和“手指运动研究”(针对手指)来观察,并将躯干的顶部接地。手臂由 3 个主要部分组成:上臂、前臂和手。上臂和前臂通过深度轴上的旋转关节连接,以模拟肘部,上臂分为两半,在垂直轴上相互旋转。每只手有三根手指,两根大,一根短,方向与其他手指相反。在图库中可以更轻松地观察动作。上传包含以下类型的文件:.f3d、.stl、.step、.m
p4, .gif。我使用Fusion 360创建了这个项目。该机制的原创者是Hisayoshi Kijima(https://www.platinumgames.com/official-blog/article/9863)。
标签:
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,STEP / IGES,Fusion 360,Rendering,Snagit