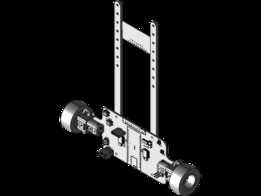
高速线跟随器
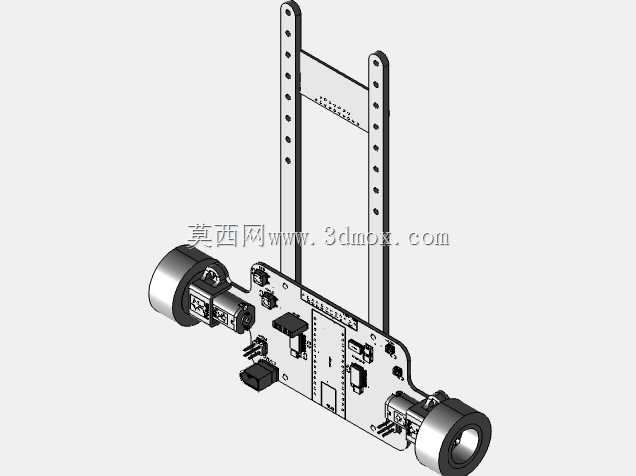


我们设计并制造了一款高性能的巡线机器人,用于大学 LFR 竞赛!虽然机械结构已经完成并经过彻底优化,但编码工作仍在进行中。我们对自己的设计充满信心,并很高兴能微调其性能。就 CAD 模型而言,它们的尺寸非常准确,因为它们是从 polulu 的产品库下载的。有关电路设计,原理图和其他文件的更多信息请访问github repo。关键组件:电池:2S LiPo微控制器:Arduino Nano传感器:QTRX MD-07 RC电机:Polulu Micrometal Gear Motors HPCB 1:10 (3300 RPM) ×2电机驱动器:TB6612FNG ×2电源调节:LM1117MP-5.0 Buck Converter车轮:Solarobotics 2WI Internal Screw ×2电池:2s Lipo控制器:Arduino nano传感器:qtrx MD-07 RC电机:Polulu Micrometal Gear Motors HPCB 1:10 3300 rpm X2电机驱动器:tb6612fng X2降压转换器:LM1117MP-5.0车轮:Solarobotics 2wi Internal Screw X2github repo链接在我的简历中


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,AutoCAD,STEP / IGES