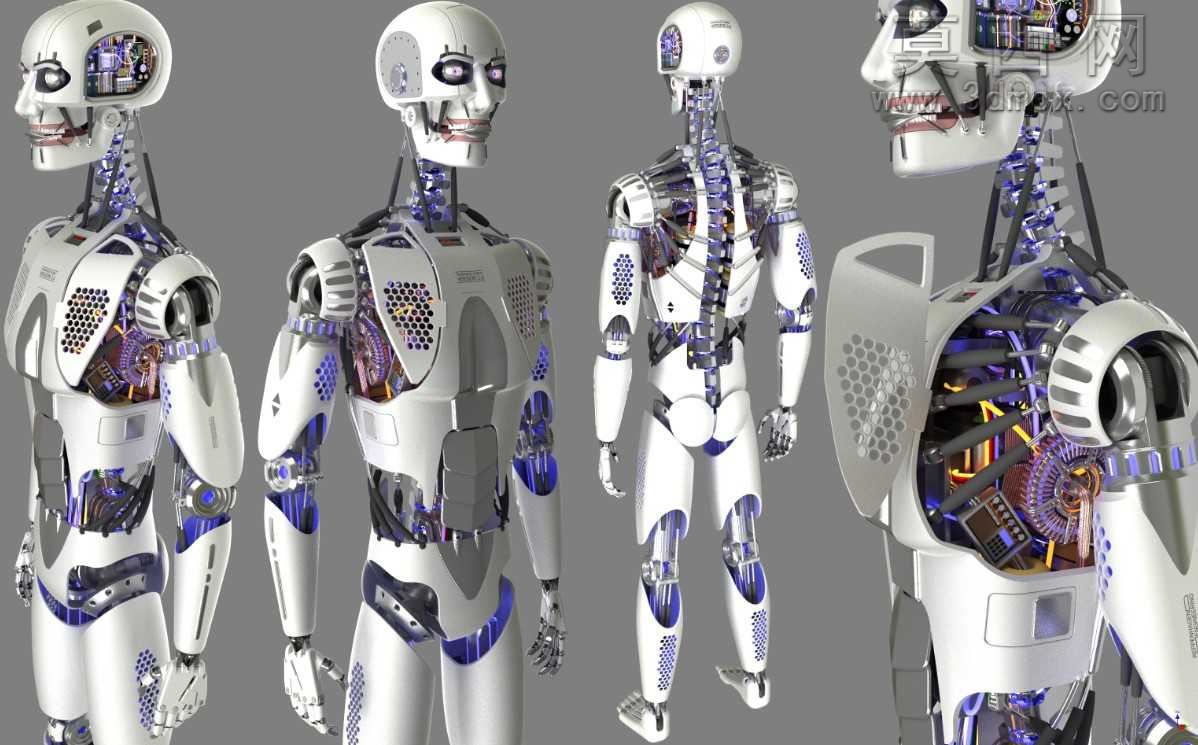
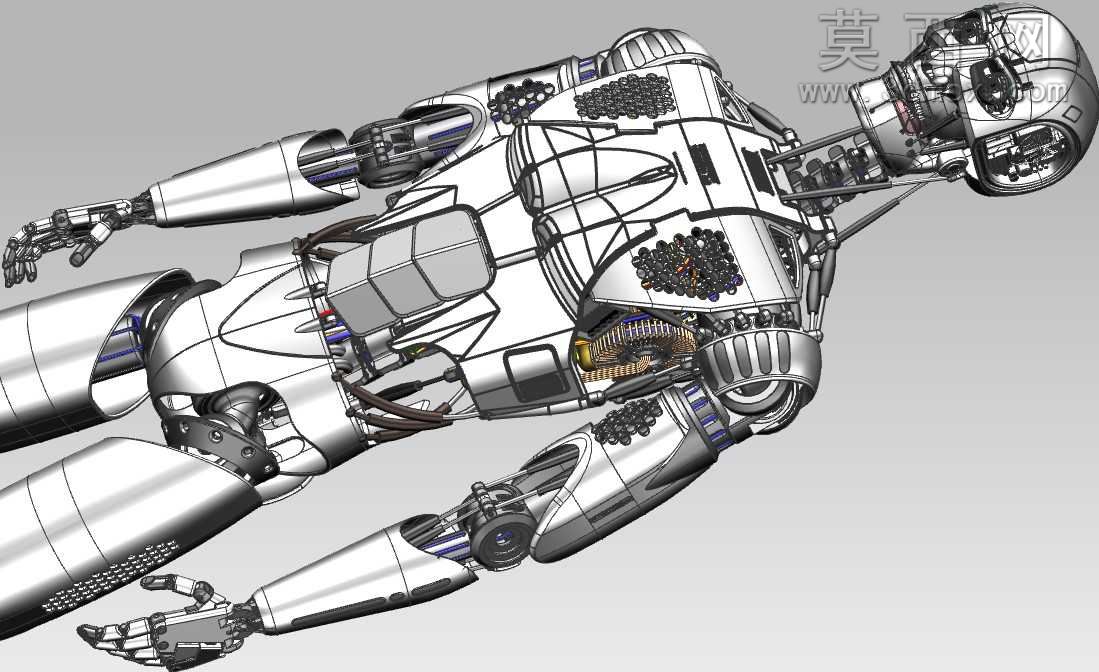
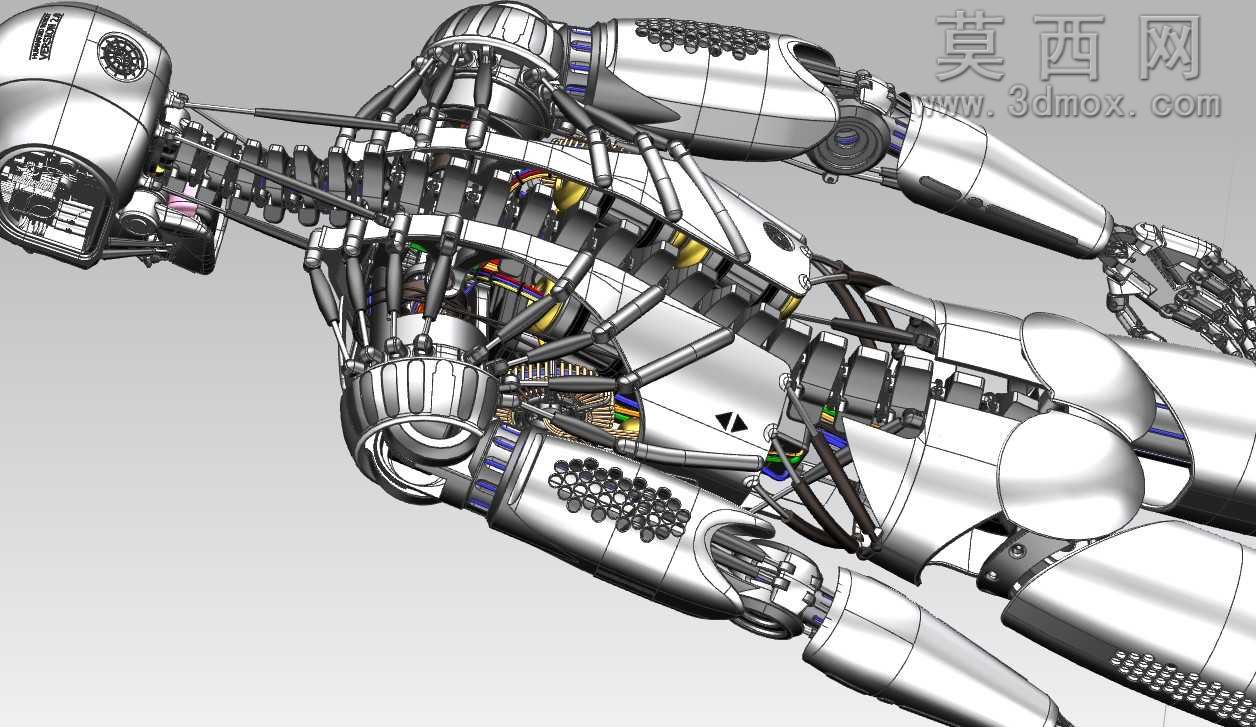
仿人机器人与环境相互影响的能力依赖于其富于表现力的交流能力,如肢体语言(包括面部表情),思维和意识的交互。目前,机器人与人的交流仅限于固定的几个词句和简单的行为方式,其主要原因是:1大多仿人机器人的信息输入传感器是单模型的;2部分应用多模型传感器的系统没有采用对话的交流方式;3对输入信息的采集仅限于固定的位置,比如图像信息,照相机往往没有多维视角,信息的深度和广度都难以保证,准确性下降。
标签:


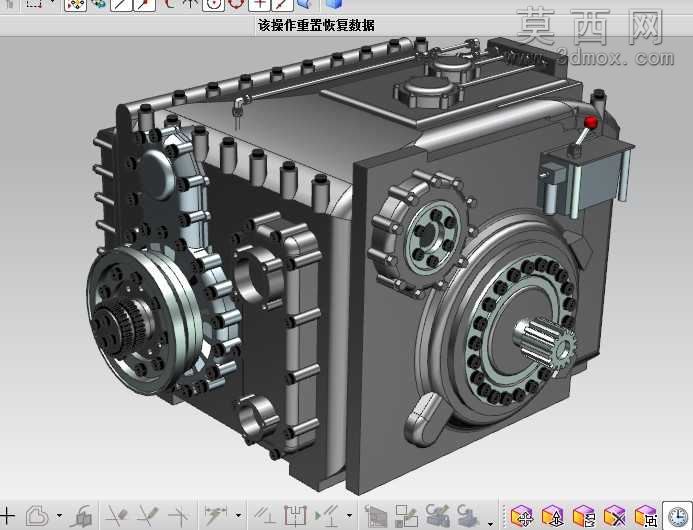
- 模型大小 :65.6MB
- 消 耗:0莫西点
- 下载次数 :
- 包含文件 :prt文件﹑装配部件