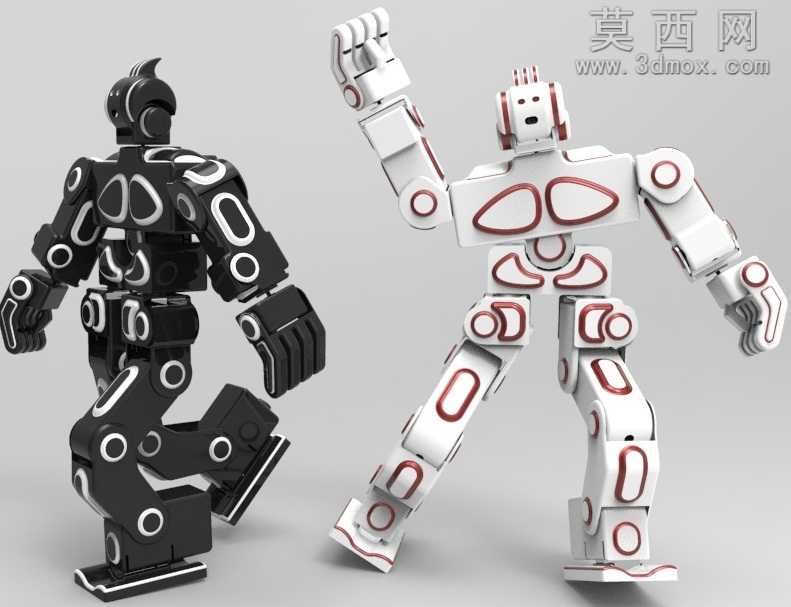
�����˵�ȫ��������һ̨�ͼ������ɡ���һ���Ƿ�ɢ������ʽ���ƣ������ö�̨�����ֵ������˵Ŀ��ƣ��統�����ϡ�����������ͬ��ɻ����˵Ŀ���ʱ�����������ڸ���ϵͳ�Ĺ�����ͨѶ���˶�ѧ�Ͷ���ѧ���㣬�����¼�������ָ����Ϣ����Ϊ�¼��ӻ������ؽڷֱ��Ӧһ��CPU�����в岹������ŷ����ƴ�����ʵ�ָ������˶�����������������Ϣ��������ҵ����Ҫ��IJ�ͬ�������˵Ŀ��Ʒ�ʽ�ֿɷ�Ϊ��λ���ơ������켣���ƺ��������أ����ơ�
��ǩ��
------�ָ���----------------------------
- ��һƪ��̫��սʿ������SWģ��
- ��һƪ��Portabee3d��ӡ��UGģ��

˵��ʲô��
- ȫ�����ۣ�0��

��û�����ۣ�������ɳ���ɣ�
- ģ�ʹ�С ��20.2MB
- �� �ģ�0Ī����
- ���ش��� ��
- �����ļ� ��װ�䲿���psldasm�psldprt