我也不想当老师,没有这个资历,也没有这个能力,但是我长久以来琢磨静力学分析,总觉得厚厚的力学书,学起来太复杂,大多数人的生活又很艰难,工作,家庭,各种琐事要面对和应付,再来静下心来研究那些力学名词,难免让人心力交瘁。于是我就想,对静力学来说,有没有一个简单明了的方法,可以让人很容易学会,又很容易的应用呢?我一直在琢磨这个问题。; G; f' F# {" K2 a
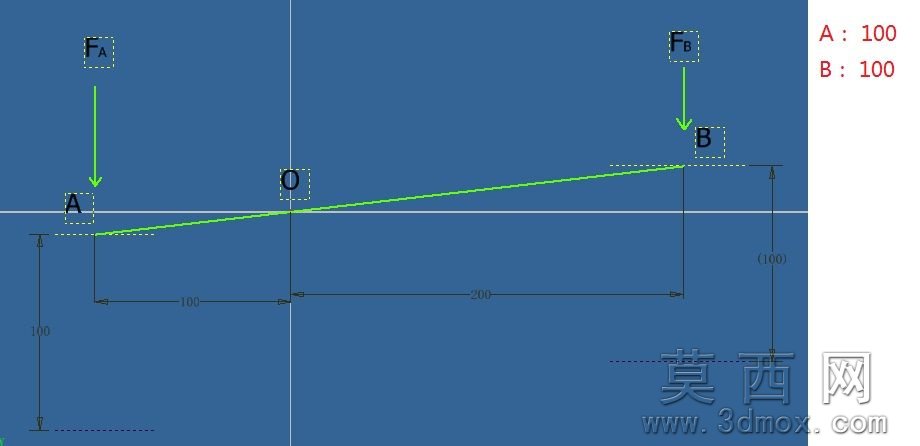
为了让大家明白这个方法,我先把最简单的杠杆原理,用这个方法从新演示一遍。 比如说上图这个杠杆,一般来说,如果知道A点的力,要算出B点的力是很方便的,只需要用一边的力,乘以那一边的力臂,然后中间画个等号,也就是 Fa * a = Fb * b,就能算出来想求的力了。但是我这个方法不这样做,要稍微比这个繁琐点,虽然繁琐,但是它却是杠杆原理的本质。并且无论多么简单和复杂的结构,都可以统一用这个方法来求出。方法贵精不贵多。
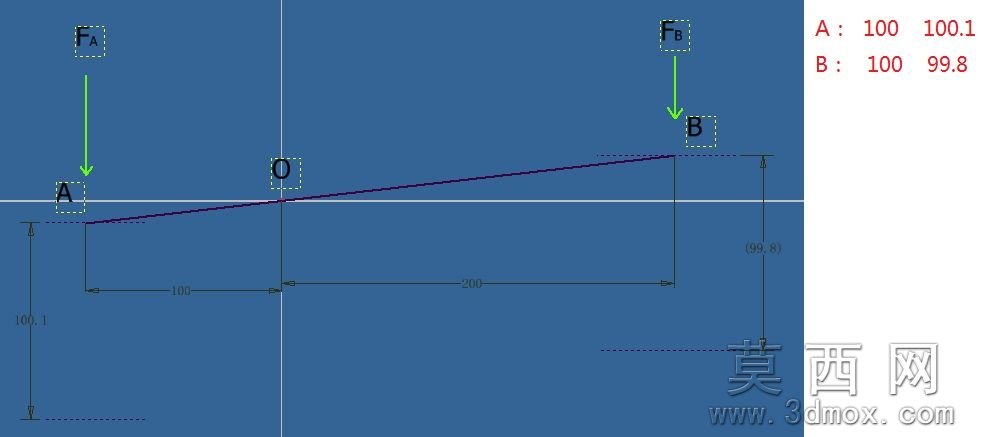
我们先在下面画两个固定点,然后分别标出左右两个端点,到两个固定点的距离,并在旁边记下来。注意这个距离多少都行,如下图。, v1 t4 g5 R; r: Z, y # D+ D' C& S$ U! Q7 p3 D 然后,对这个距离做点变动,比如将左边的100,改为100+0.1,注意,增加的这个量要尽量小,暂且就定为0.1吧,等你熟悉了这个方法之后,你就知道为什么要取这么小了。实际上,这个数是越小越好,越小,最后得到的结果就越精确。那么左边的距离改变后,右边的当然也会跟着改变了,我们在刚才的数字旁边将这两个新数也记下来。; u* y! @# j4 V" E6 V 接下来,就是处理数据了。我们将两个距离的改变量也算出来,写在后面,如图:2 O: X& b% ], S 蓝色的数字就是改变量。一般来说,它是一个正一个负,因为对一个结构来说,上面的作用力,总可以分为主动力和被动力,所以位移也是一正一负。(其实正负号是无所谓的,可以忽视的)。这两个数字呢,就可以看作两端的那两个力的作用距离。也就是说,当左边的力Fa在它自己的作用方向上移动了0.1mm时,右边的力Fb就在它自己的作用方向上移动了0.2mm。我们可以把左边的力看作手往下压,右边的力看作是铁块在上升,那么根据能量守恒原理,手往下压所作的功,要转化为右边铁块的重力势能。不管这个位移是多么小,能量的总量都必须要守恒。所以这时我们就可以列一个式子:& L Q% M8 J; J m 这跟开头那个式子的结果,是一模一样的。也就是说,在简单杠杆的情况下,我们这个方法是可行的。! H4 {) |# {6 J% J) V
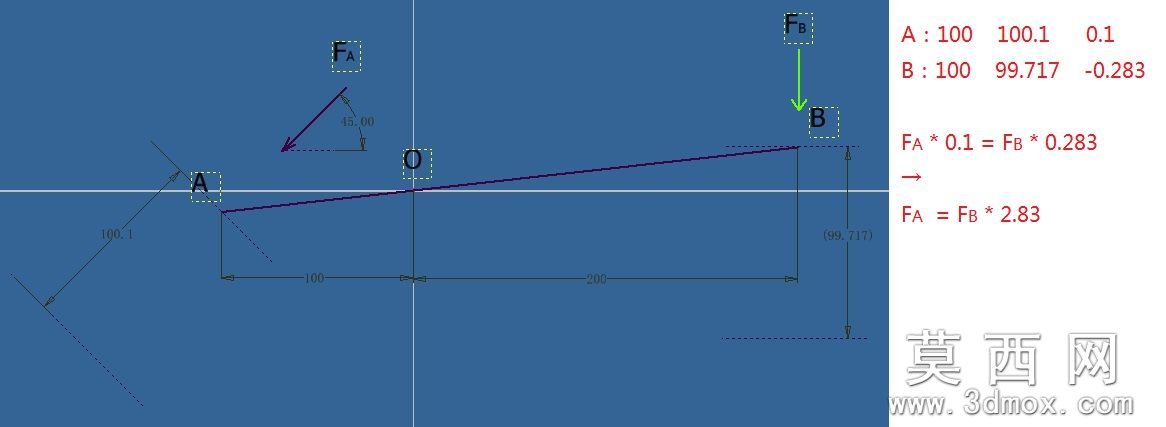
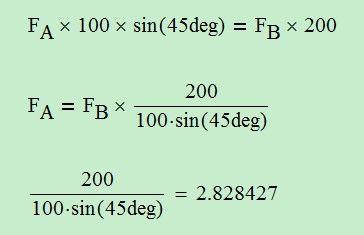
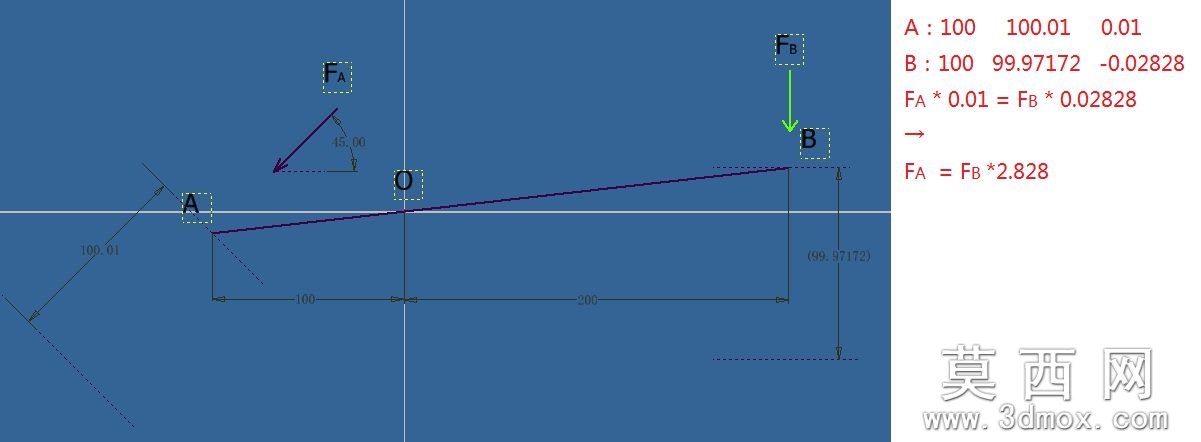
. ~: K" @$ M5 m s& ~% z9 L 有人说,你这个方法的结果,虽然也是对的,但是却这么复杂,比起传统的杠杆原理的算法,有什么优点呢?就上面这个最简单的情况来说,是看不出优点的,只有缺点。但是随着结构变得复杂,它的威力才会显现出来。下面我们来看,还是这么个简单杠杆,但是力的方向是偏斜的,这个时候它的优势就显露出来一点了。大家看下图,还是那么个步骤,第一步,先在力的作用方向上随意定两个尺寸,第二步,将尺寸作微小变动并记录变动量,第三步,列能量守恒方程,到此就算完成了。有一点要注意,原始条件是,Fa的夹角是45度,两个尺寸都是100,那么对左边的100增加了微小的0.1后,右边的尺寸有了微小变化,并且45度的角度也变了!但是,这个对结果是没有影响的。可以不用管它。为了简化篇幅,这些步骤都综合到一张图上。 大家看到,二者的比例是 2.83。为了检验结果,我们用传统方法再算一次。( b+ ~2 q+ l5 M o # y- X r% [& n5 ?* d! o 可以发现,结果是很精确的,都精确到第二位小数了。因为我们的变动量只取了0.1,如果能取0.01,0.001甚至更小,那么我们的结果就更精确。我们不妨试一试。 7 t. V% K; j3 G& T$ E. s 看结果,已经能精确到第三位小数了。这里请注意,变动量越小,数字显示精度要调得越高,否则,它把后面的一省略,比如它把99.97172省略成99.97,结果就等于3,就相差了很远了。
9 c. u n" P4 l* c, T3 u 这是对简单杠杆情况的应用,说明它的结果是可信的,并且不用列复杂的方程式,只需要画图形就行了。其实到目前,这个方法的真正优点还没有显示出来,其实这个方法真正的优势在于复杂的结构上。当面对复杂结构的主动力与被动力计算时,这个方法的直接、简单与有力的特点,才会显露出来。 S7 l+ n7 U, v 3 Z8 C8 ~8 U: p% F 题意大概是已知扭矩T,也就是R右端的切向力,让求力F的大小。传统的方法我就不提了,如果用新方法,过程就如下图,大家看,方法是很简单的。(假设了角度B为30度)2 f3 @2 g7 p* p4 I! X$ ?% B! c$ b 6 L5 x( s( M" k, c- s3 l) ~ 有兴趣的朋友不妨琢磨琢磨上面这个题目。
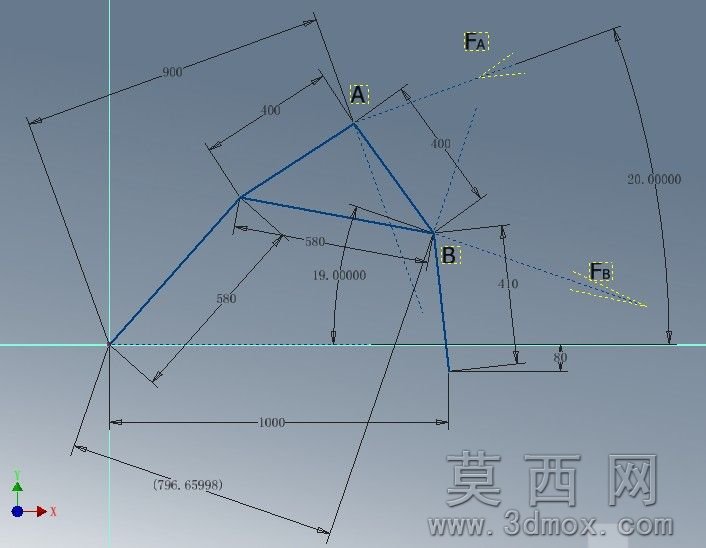
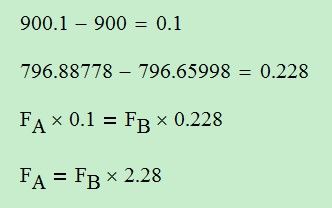
+ o7 `, e& j5 y* X$ k8 P5 l3 W# p 最后我自己做了一个题目,这个题目是随意做的,只是为了表现这个方法的优点。如图,这是一个四杆机构。并且中间还带了一个三角架。现在有两个力作用在上面,一个Fa,与水平轴成20度角,指向左下方,一个Fb,与水平轴成19度角,指向右下方。可以看出来,Fa的作用点一动,所有的杆都在动。如果用传统的方法,你怎么去列这个平衡方程?但是用上面的这个方法,就很简单。为了定原始尺寸,我采用了一个方法,就是过力的作用线作垂线,然后量它到原点的距离,作为基本尺寸。即图中左上角的 900,和左下角的 796.65998。
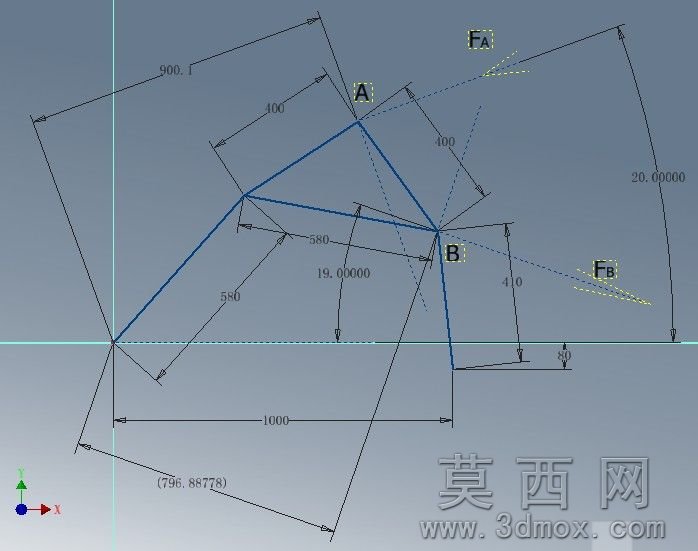
然后给其中一个尺寸一个微小增量,如900+0.1,再看它的变化。 , \1 H/ _% E( x; A% u/ j/ V 然后把这两个数记下来,可以得出两个力的比例关系:/ \1 Q/ z2 Y$ h {- q, A) s8 n1 f. b
Capture2013-12-10-0.04.59.jpg(8.63 KB, 下载次数: 8)
下载附件
2013-12-10 00:05 上传
我没有用传统的力分解法去验算,我觉得这个数是可靠的。有兴趣的朋友,不妨用传统的分析法作一分析,看看这个方法算出的结果,到底是不是正确的。
9 b6 H$ _ w% t/ P3 |- k C9 s 这个方法叫做虚位移法。虚位移就是无穷小位移,对于大尺寸来说,0.1就相当于无穷小位移,当然了,0.01,0.001,增量越小,越接近无穷小位移,所得到的结果就越精确。虚位移法的依据是虚功原理,结构在无穷小可能变位时依然遵循能量守恒定律,就叫做虚功原理(这句话是我的理解)。