Antweight Shuffler 模块



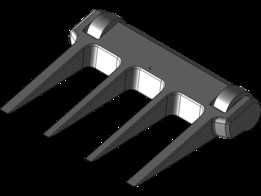
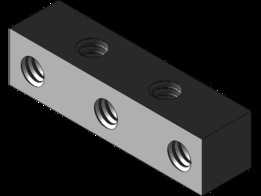
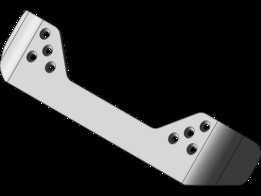
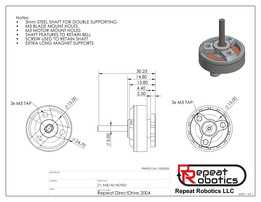
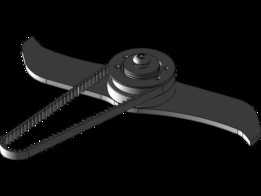
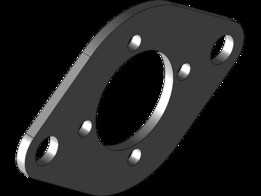
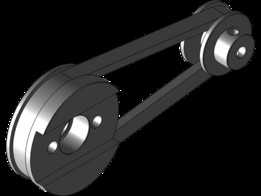
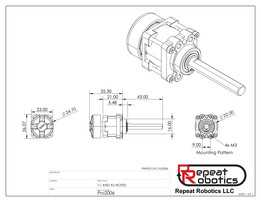
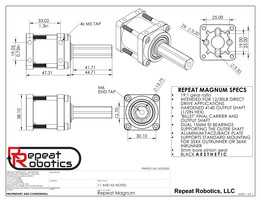
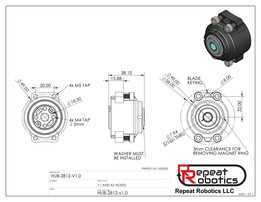
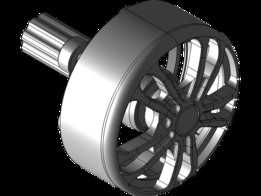
这是为我的机器人 Scalar X 设计的随机轮模块示例。它旨在用随机轮替换 1.75 英寸 x 0.75 英寸的轮子,从而增加重量。安装部件由 2 毫米碳纤维制成,并用 4 个 4 号塑料固定在框架上。凸轮和支腿由 TPU 打印而成。您还需要 2 个 M3 螺钉和一个用于枢轴的长重复驱动轴,以及 2 个 M2 螺钉将电机固定在板上。组装时,请务必在凸轮和支腿之间的凸轮轴周围涂抹润滑剂,以减少摩擦。我使用的是 3 毫米重复驱动有刷版本,但无刷迷你版本也应该可以正常工作。此模型没有任何牵引几何结构,因此您必须自己弄清楚,并且腿部几何结构可能需要优化,以提供更好的运动效果和更快的倒立运动。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,AutoCAD,Snagit