机械臂
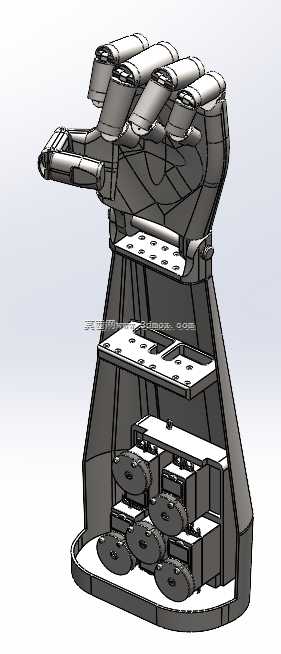
这款机械臂旨在通过伺服电机和鱼线驱动手指,模拟人类手部动作。它采用轻质铝制框架,可执行抓取和举起等基本任务。该系统通过摄像头和 Arduino 进行手势控制,展示了一个简化但功能齐全的工业机器人操作器模型。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering,Snagit




这款机械臂旨在通过伺服电机和鱼线驱动手指,模拟人类手部动作。它采用轻质铝制框架,可执行抓取和举起等基本任务。该系统通过摄像头和 Arduino 进行手势控制,展示了一个简化但功能齐全的工业机器人操作器模型。