机械手
这款全关节机械手采用 SolidWorks 建模,拥有 14 个独立关节,可实现高度灵活性和类似人类的手指运动。非常适合仿生手原型、机器人研究和运动研究。特点:14 自由度关节设计(每根手指 3 个,拇指 2 个);逼真的解剖比例;专为驱动模拟和运动学分析而设计;轻巧且易于编辑的几何形状


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS,Snagit


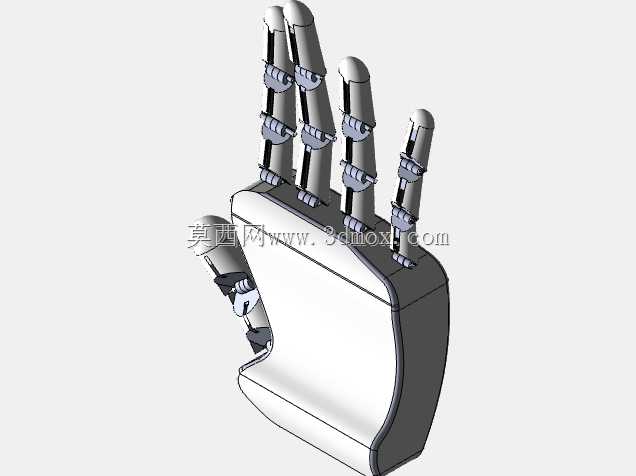

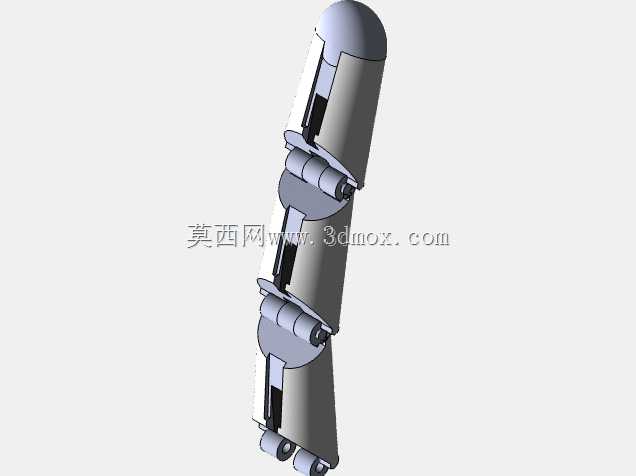

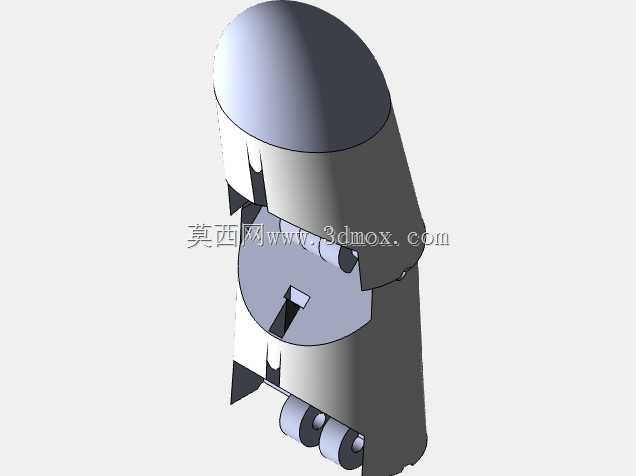

这款全关节机械手采用 SolidWorks 建模,拥有 14 个独立关节,可实现高度灵活性和类似人类的手指运动。非常适合仿生手原型、机器人研究和运动研究。特点:14 自由度关节设计(每根手指 3 个,拇指 2 个);逼真的解剖比例;专为驱动模拟和运动学分析而设计;轻巧且易于编辑的几何形状