3ddl ARM_ROBOT
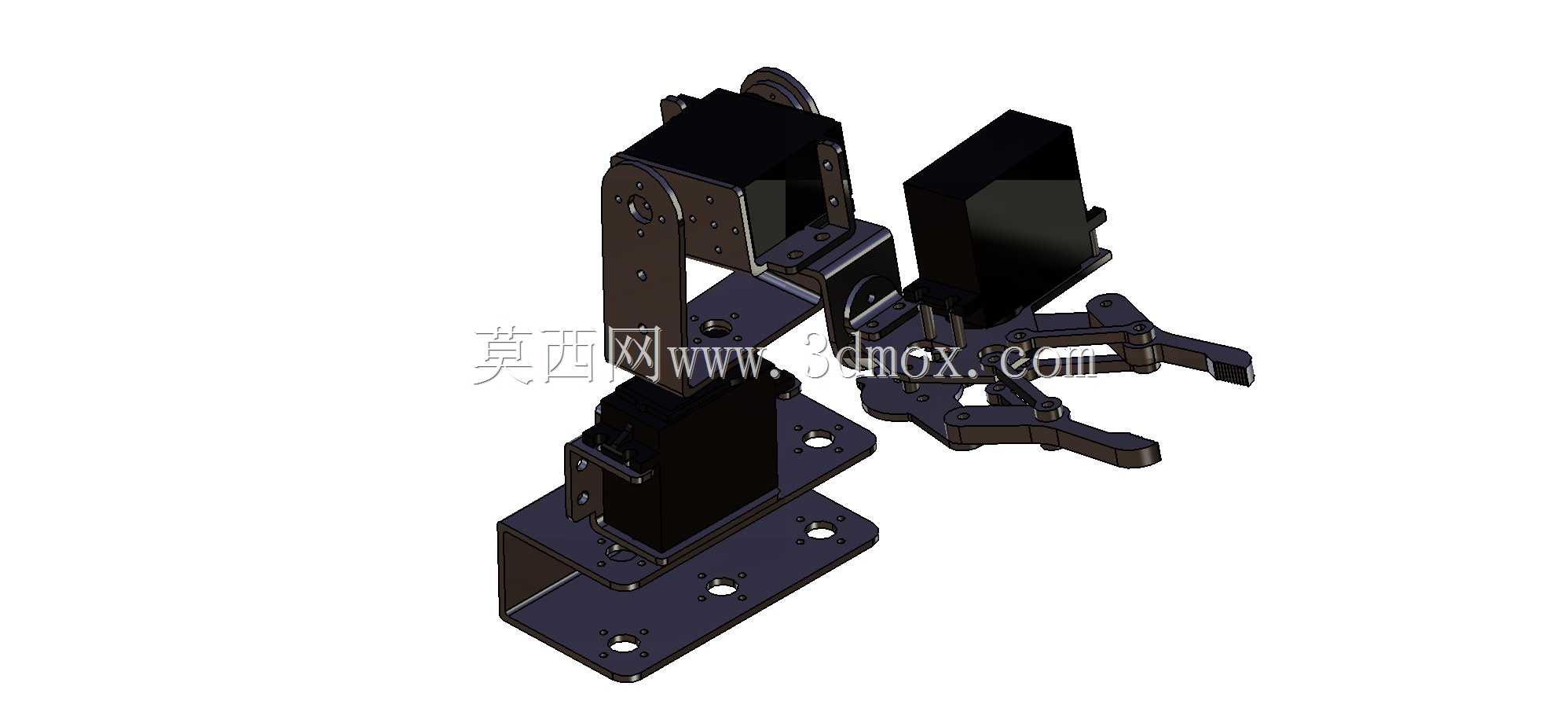
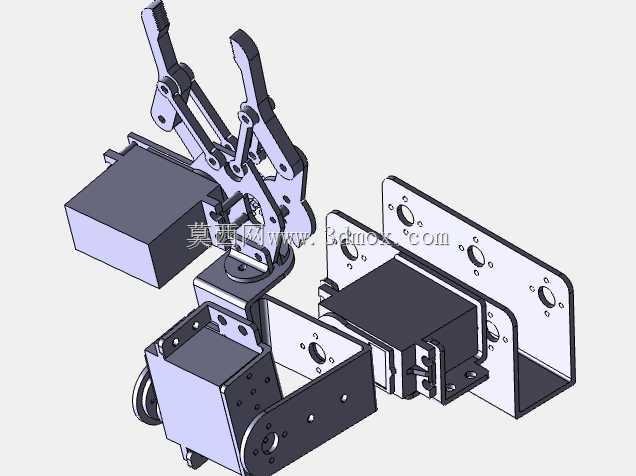
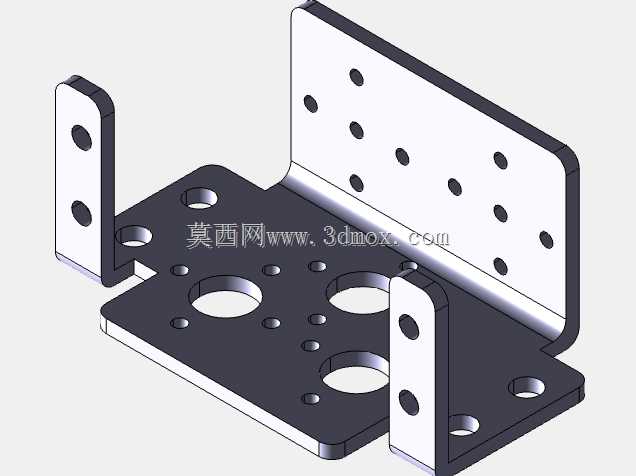


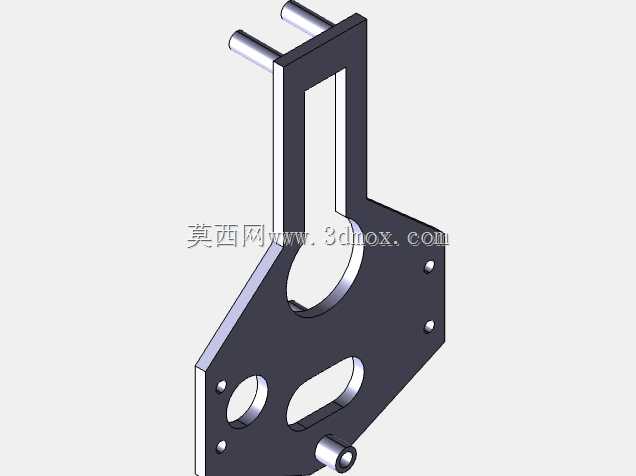
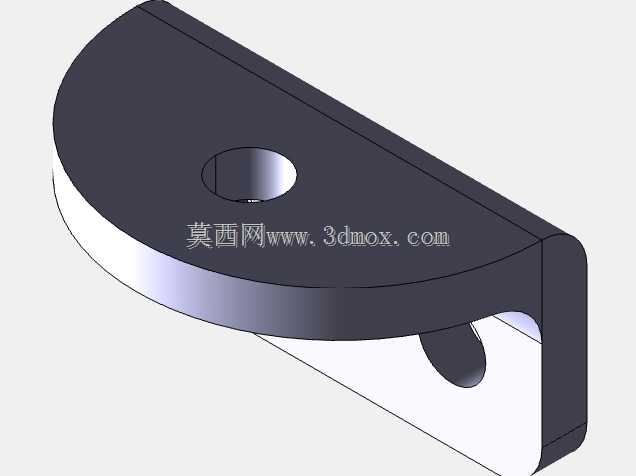


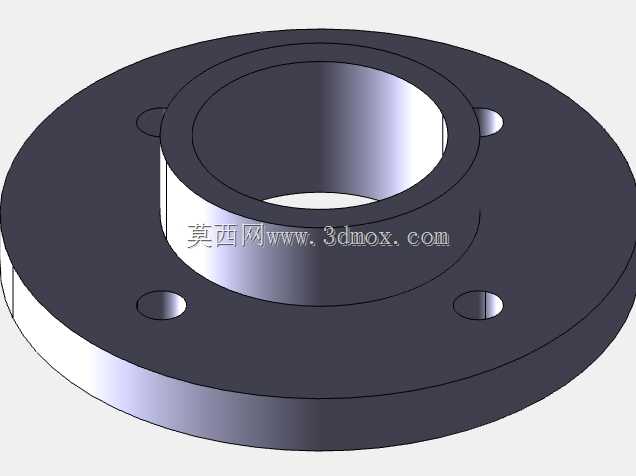
使用 CATIA 设计的三自由度机械臂 (ARM_ROBOT) 的 3D 装配模型具有坚固且精确的结构,可用于执行操作任务。它由一个固定基座(允许整个手臂绕垂直轴旋转)、一个通过水平旋转关节连接到基座的第一节(肩部)、一个可实现中间伸展的第二节(前臂)以及一个用于精确定位末端执行器的第三节(腕部)组成。关节由步进电机或伺服电机驱动,以实现平稳、精确的运动。末端执行器(例如夹持器或定制工具)可互换,以适应各种应用。该设计采用轻质铝和耐用不锈钢,确保刚性和轻量化。该模型是在 CATIA 的零件和装配体设计环境中开发的,并设置了运动学仿真来验证运动和工作空间覆盖范围,使其成为机器人研究和应用的多功能解决方案。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :CATIA,Rendering