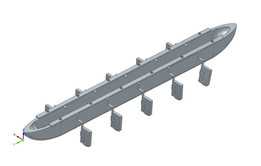
Nymph-E:河流垃圾收集装置

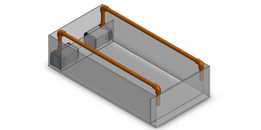
此3D模型是Nymph-E项目的自动化收集装置,该项目是一个模块化、可扩展的垃圾拦截系统,旨在防止垃圾进入达沃湾。该装置设计安装在浮动屏障系统的末端。其工作原理是利用河流自身的水流驱动水车。水车进而驱动传送带,将漂浮垃圾从水中提升并输送到岸上的收集池进行妥善处理。该设计属于纯机械系统,无需外部电力,对海洋生物安全。该实体收集装置还将与物联网增强系统配合使用,用于实时垃圾监测和数据分析。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering