ˮ�»���������������ͣ�


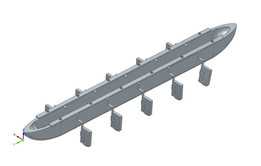
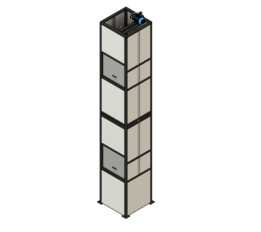
����һ��ˮ�¸������ƻ������CADģ�ͣ�רΪ������ȵ��ڶ���ơ���ģ�Ͳ���ע���������Ϊ�ƽ�װ�ã�����ˮ��λ�Ʋ����˶������ɵ��ݸ���ĸ���������ƶ�������ע�������Ӷ�ʵ�ֶԸ�������ȵľ�ȷ���ơ�����Ʒdz��ʺ����ڷ���ˮ�º������о�����������̽���Լ�ROV/AUV����������������˶������������ʵ��ԭ�ͽ����Ż�����Ҫ�ص㣺? ����ע�����ĸ������� �C ͨ�����ڽ�ˮ����ˮ����������ȡ�? ˿����ĸ��� �C ����ת�˶�ת��Ϊ�����˶�������ע������? ����ģ�黯��� �C ������ˮ�»�����Ӧ�á�? �ɶ������ �C �ɸ��ݲ�ͬ���ƽ��Ϳ��Ʋ��Խ����ġ�
��ǩ��
------�ָ���----------------------------
- ��һƪ��ê�� 102mm
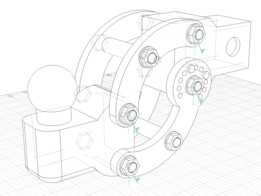
- ��һƪ��CH4481P ������װ˫�˿���

˵��ʲô��
- ȫ�����ۣ�0��

��û�����ۣ�������ɳ���ɣ�
- ģ�ʹ�С ��δ֪
- �� �� ��5Ī����
- ���ش��� ��
- �����ļ� ��STEP / IGES,Rendering