移动式全向机器人的设计与控制
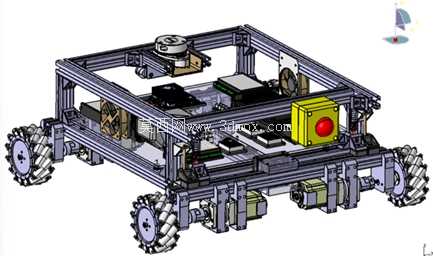

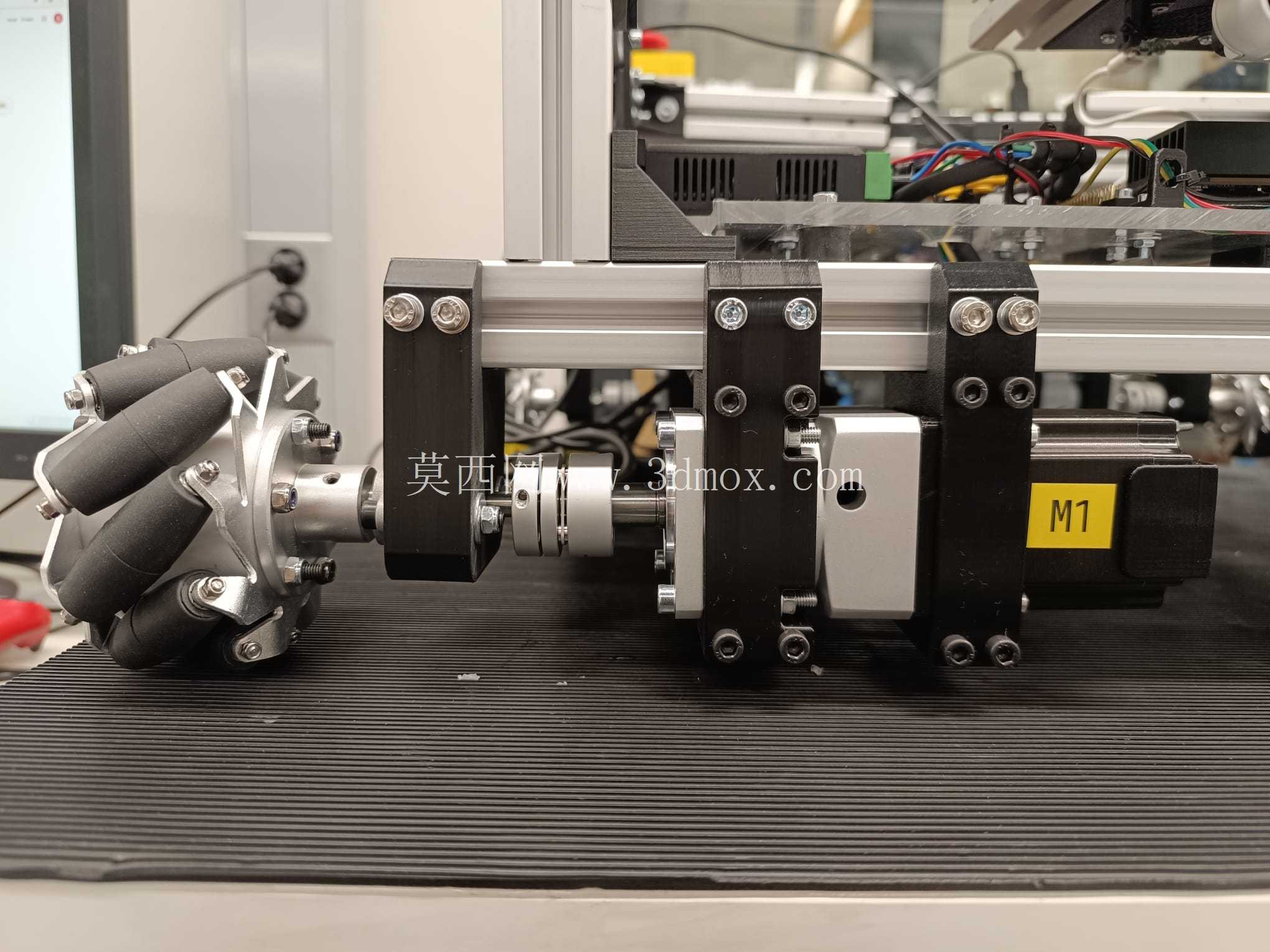


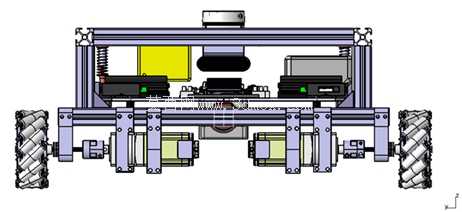
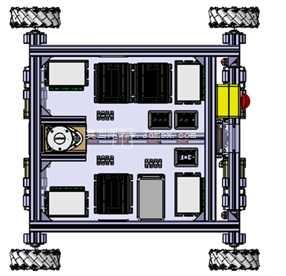

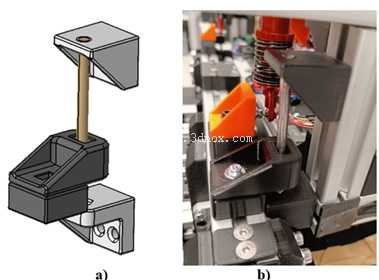

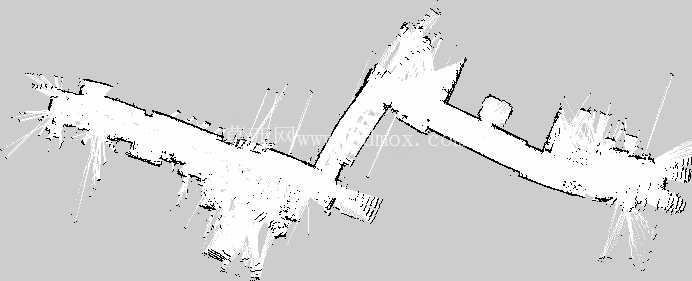



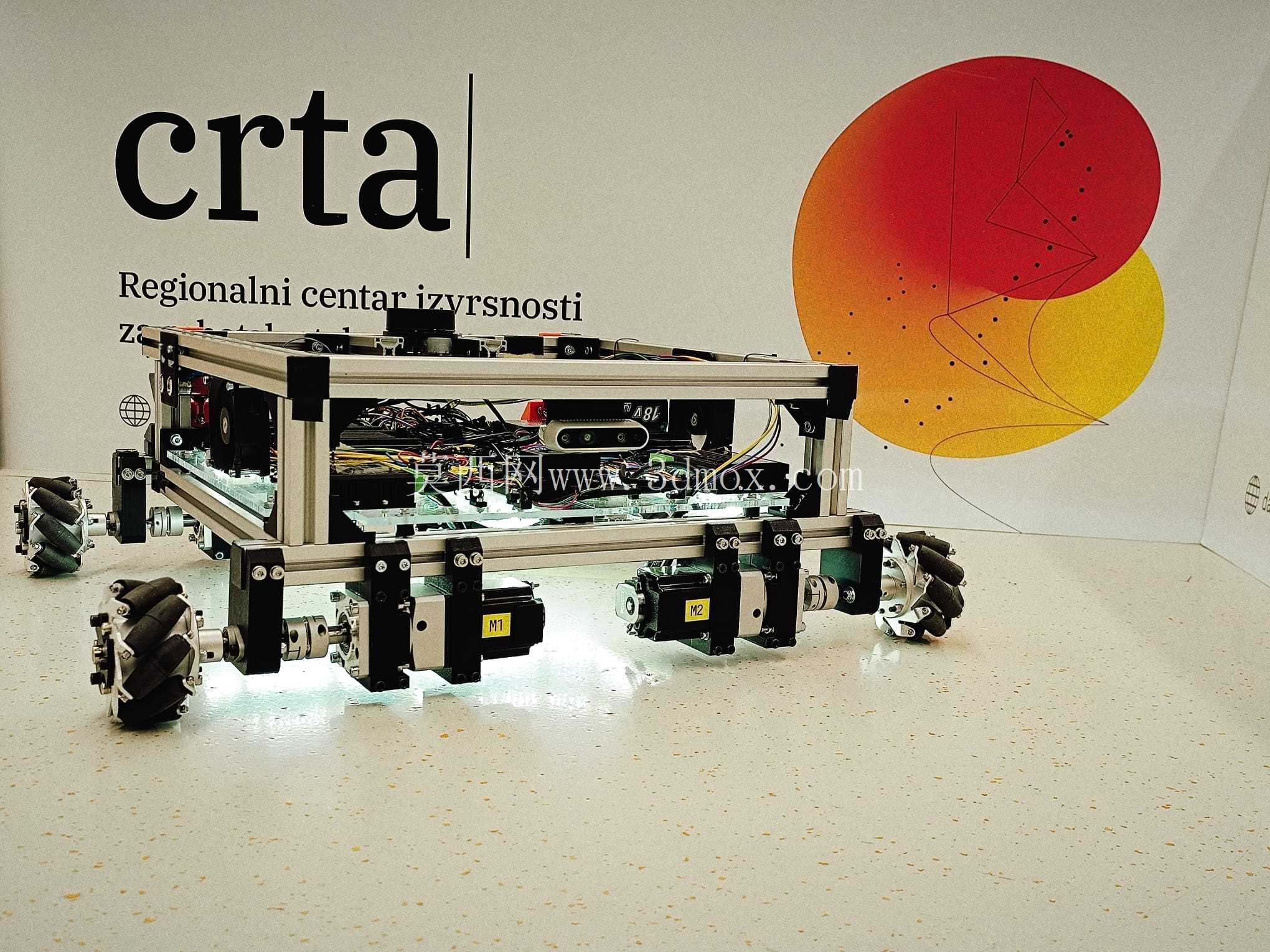

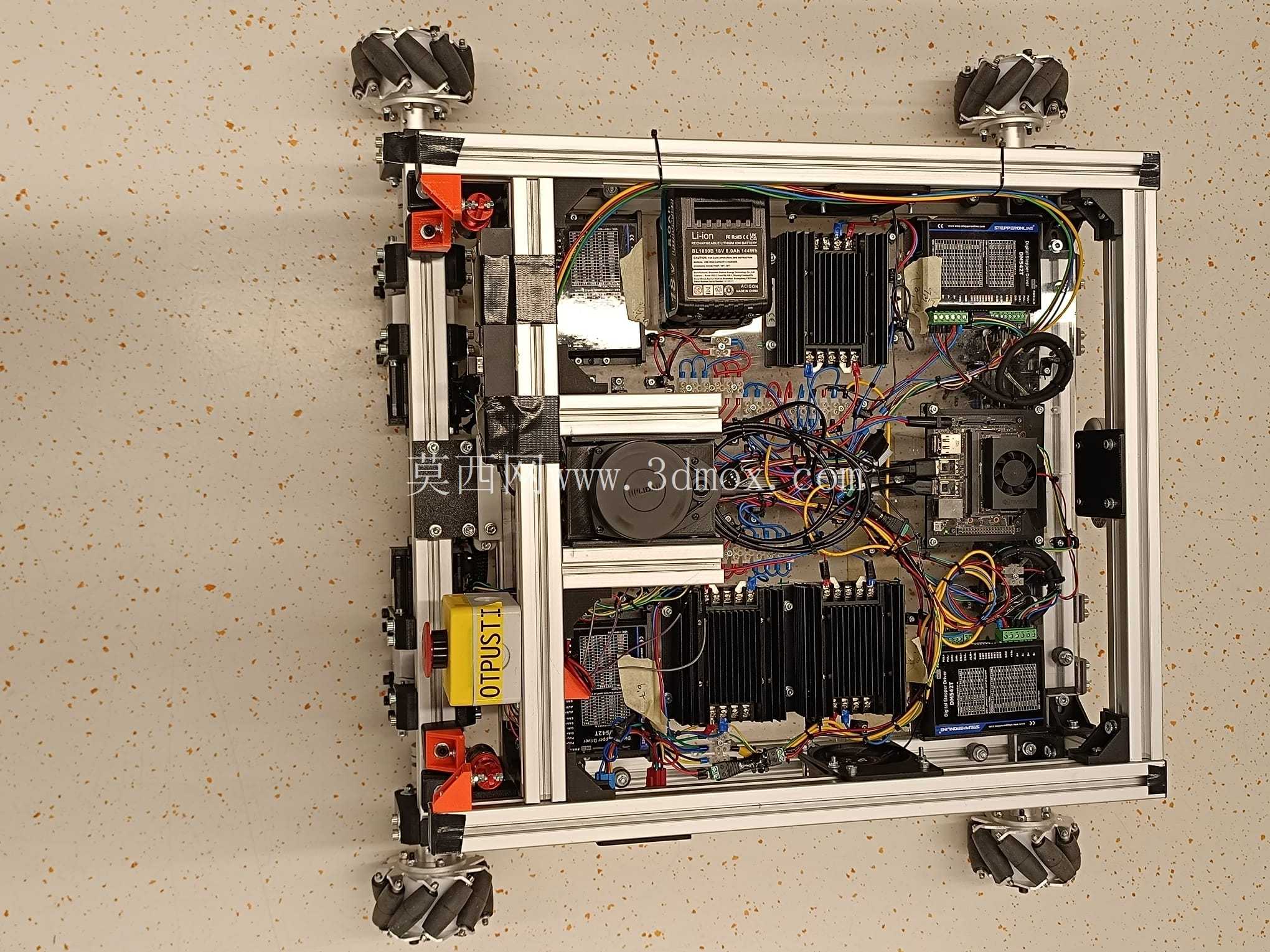


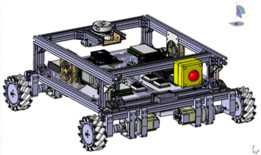
移动机器人是机器人技术的一个分支,在工业、医疗、农业和日常生活中有着广泛的应用。移动机器人的发展使得以往需要人工干预的任务得以自动化,从而提高了操作效率和安全性。本硕士论文将介绍移动平台的开发过程,从在CAD软件Catia V5中进行模型参数化、机械和电子元件的选择,到平台原型的物理制造,最终在ROS 2框架下使用ROS2 Control实现自主系统。此外,还将利用传感器系统实现环境建图、定位和自主导航算法。最后,将在CRTA实验室对麦克纳姆轮移动机器人的运动进行实验验证。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES,Snagit