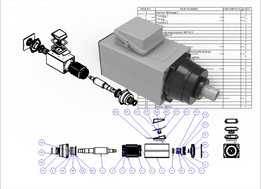
仿生机械手
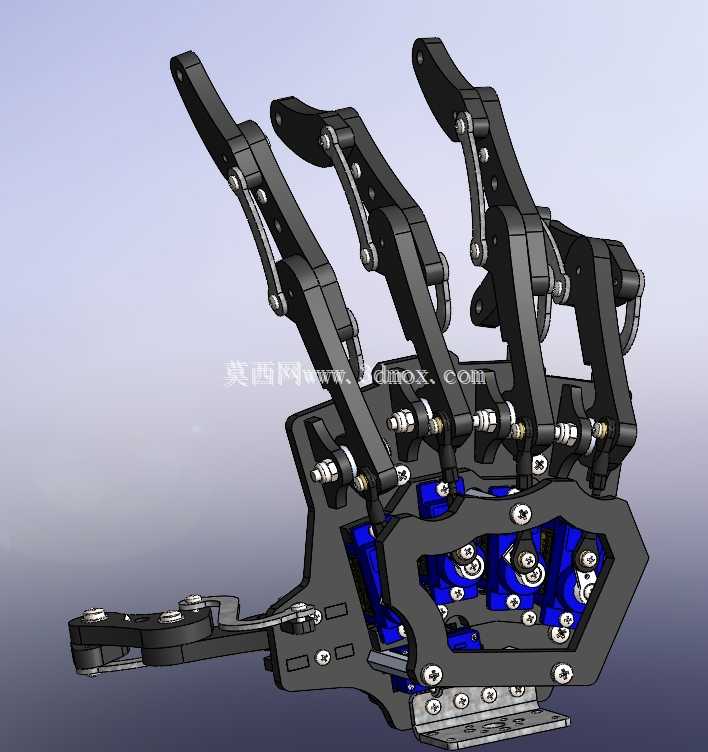
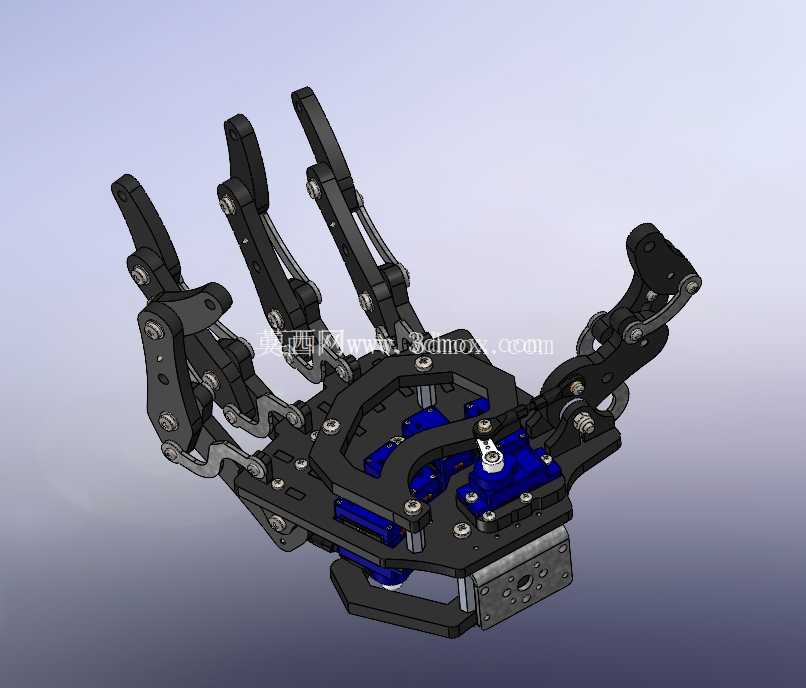
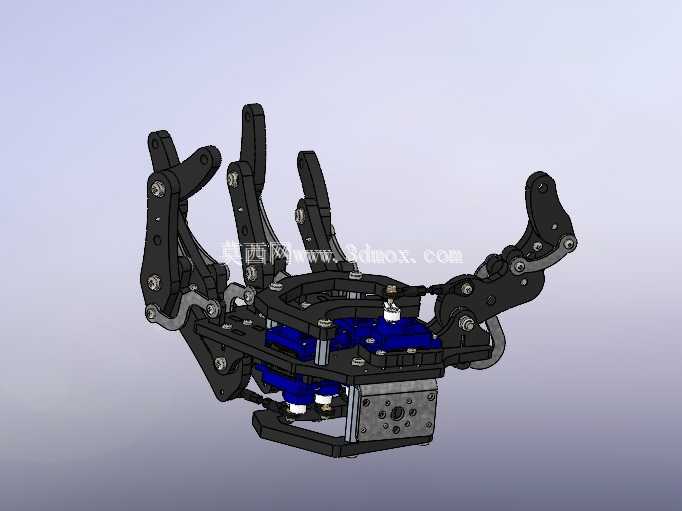
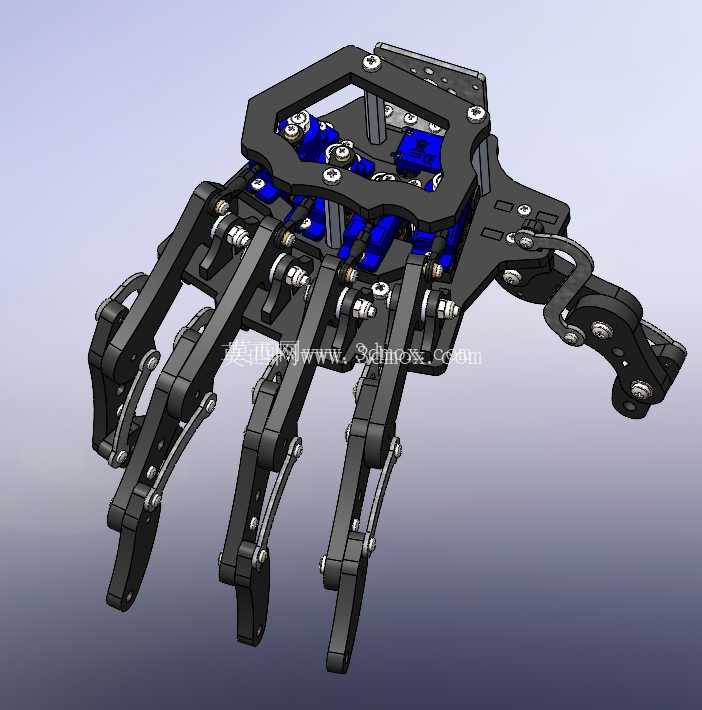
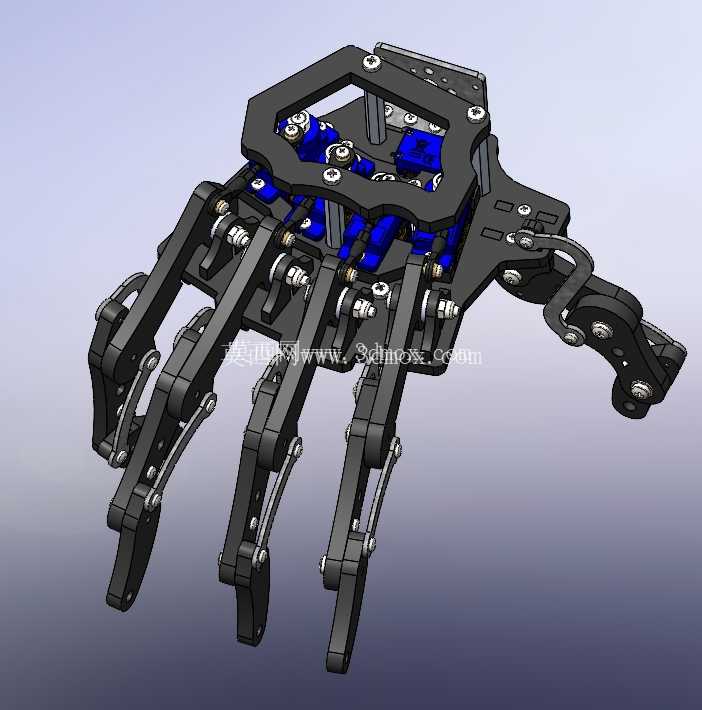
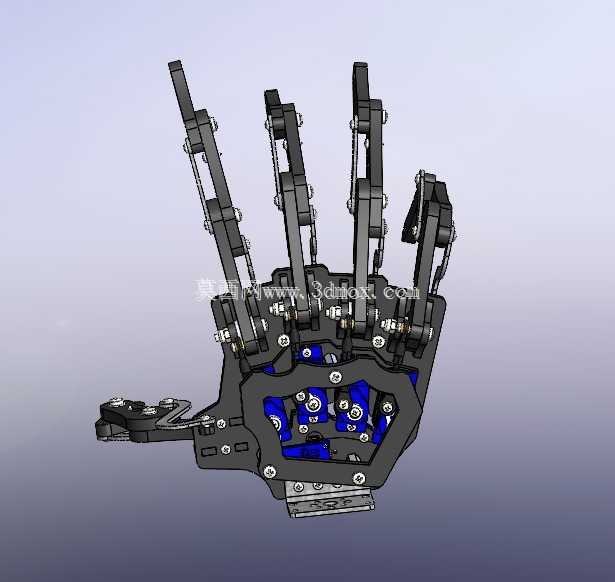



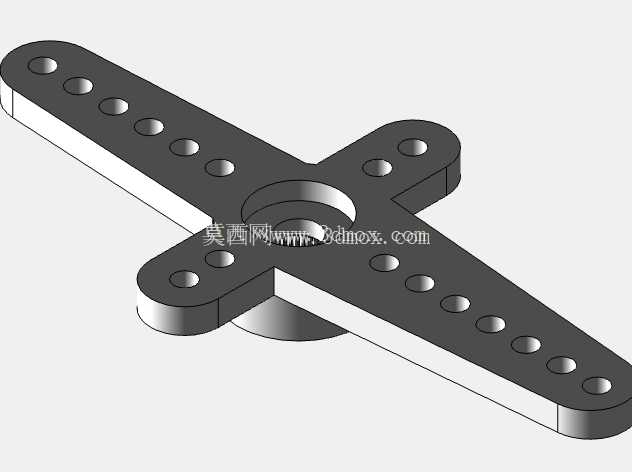






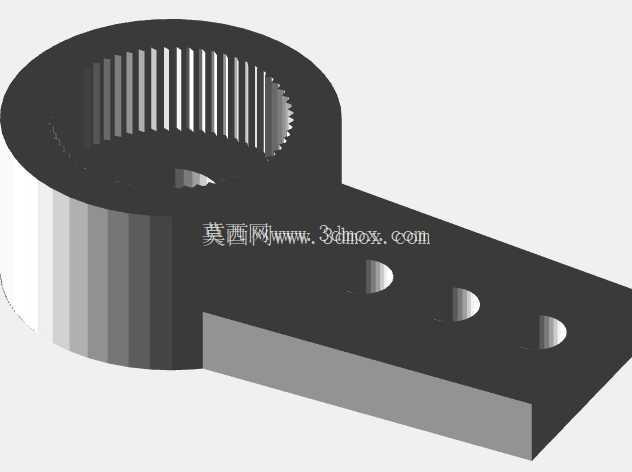
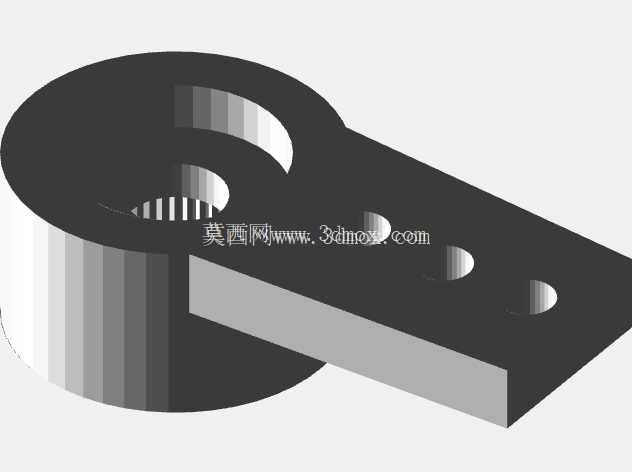
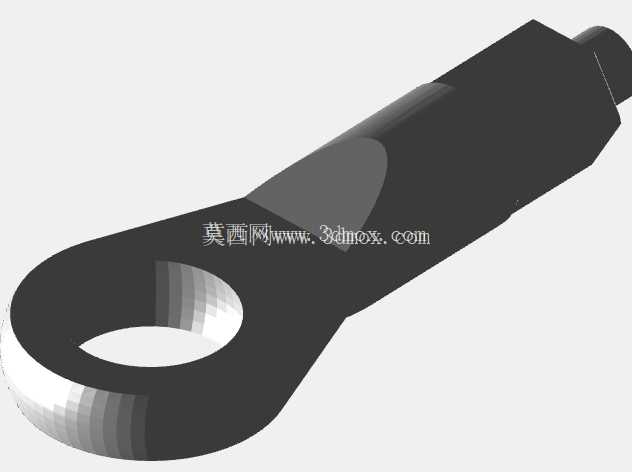











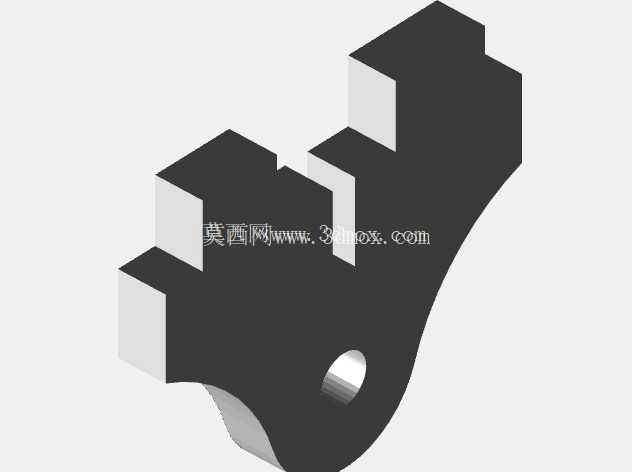
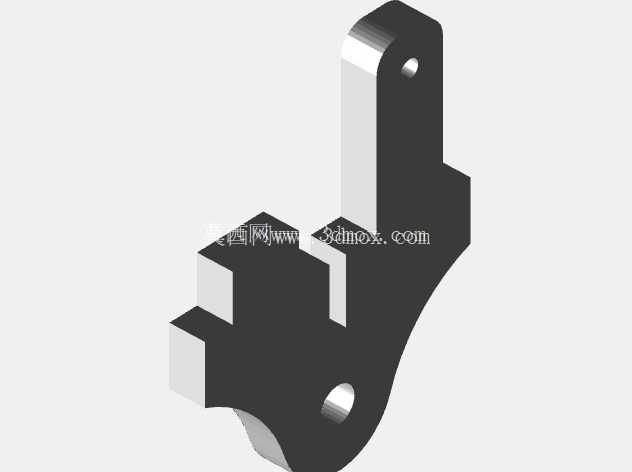





















































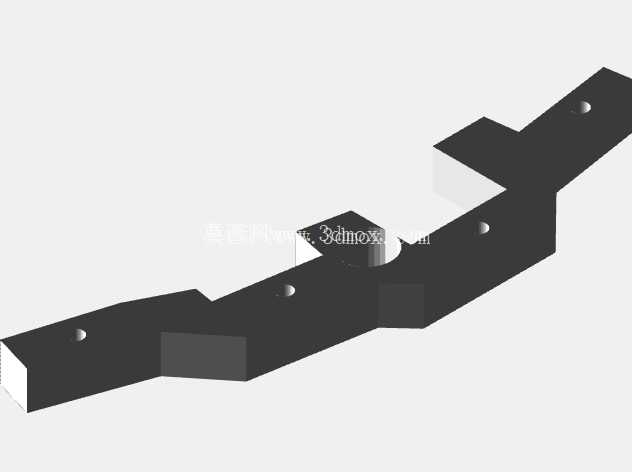
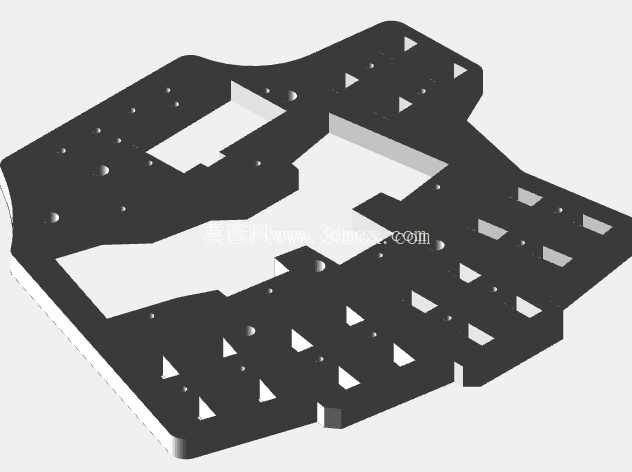






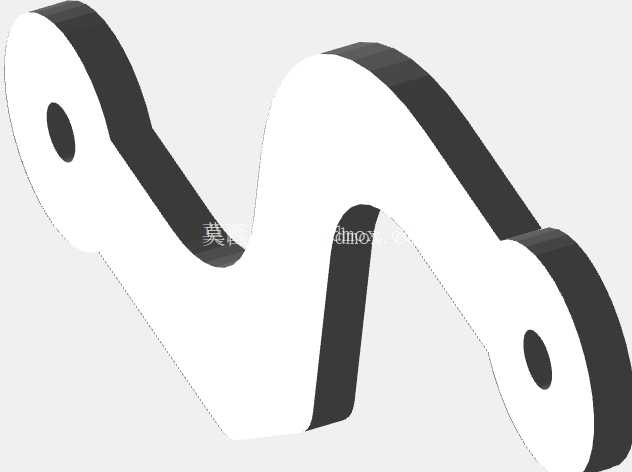

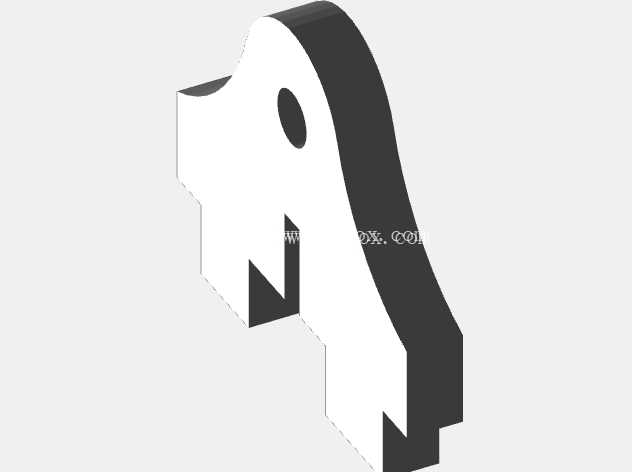

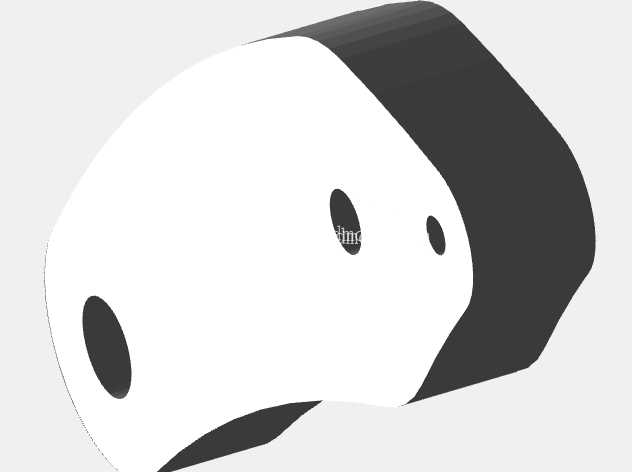

































该模型展示了一款肌腱驱动的五自由度机械手,其手指可独立驱动。该组件包括仿生手掌、机械连杆、伺服安装支架、指关节和连接硬件。该机械手兼容微型伺服或标准伺服配置,并可使用 Arduino、ESP32 或任何支持 PWM 输出的微控制器进行控制。该设计旨在用于工程实验、控制算法开发、手势研究、假肢研究和机器人学习应用。
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,SOLIDWORKS,Rendering,STEP / IGES,Parasolid