四轮差速移动机器人概念设计
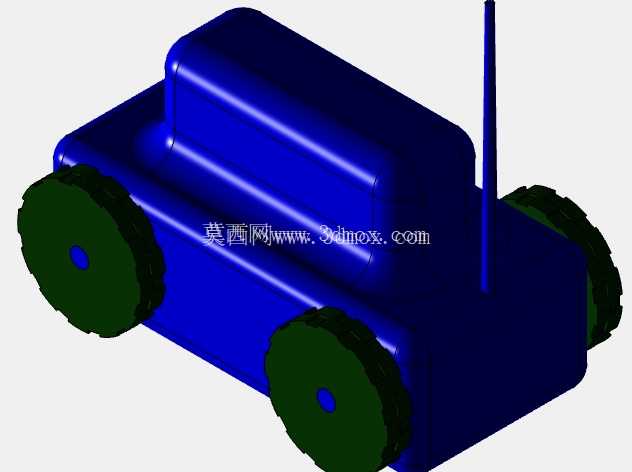
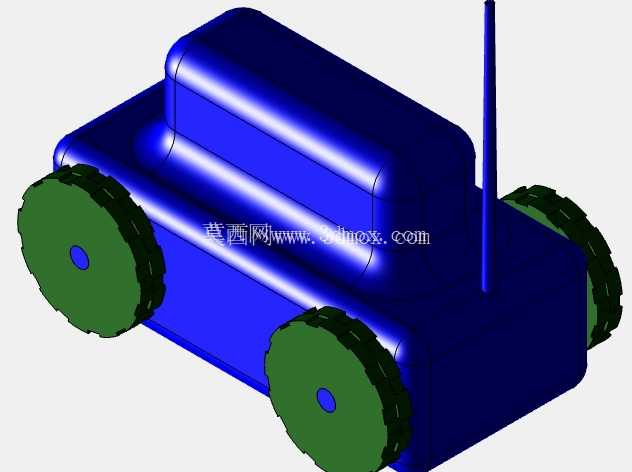


这是一个简单的四轮差速移动机器人三维模型,使用 PTC Creo 设计,然后导出到 SolidWorks,并在 Simscape 中进行物理仿真。该模型将应用于不同的移动机器人平台。
标签:
------分隔线----------------------------
- 上一篇:带后置螺旋桨的倾转旋翼双旋翼无人机概念设计
- 下一篇:wheel_correct

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Solid Edge,SOLIDWORKS,PTC Creo Elements