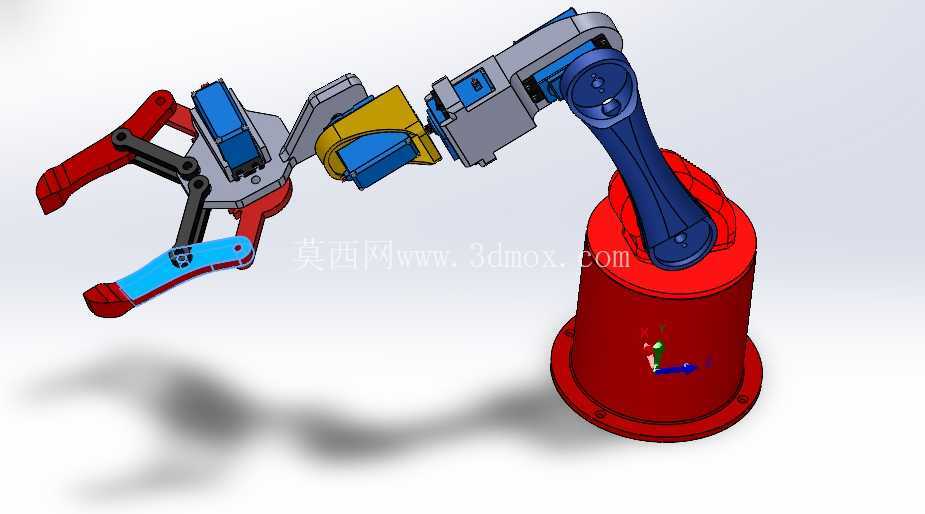
带夹爪的关节式机械臂
这是一个全关节式机械臂模型,专为通用拾取和放置任务而设计。它具有 5 个自由度,并包括由伺服电机驱动的精细爪式夹具机构。该设计包括电机安装座、连杆和可实现广泛操作范围的旋转底座。非常适合自动化项目、教育目的或机器人模拟环境。使用 CAD 软件创建,注重运动可行性和真实的关节驱动。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering


这是一个全关节式机械臂模型,专为通用拾取和放置任务而设计。它具有 5 个自由度,并包括由伺服电机驱动的精细爪式夹具机构。该设计包括电机安装座、连杆和可实现广泛操作范围的旋转底座。非常适合自动化项目、教育目的或机器人模拟环境。使用 CAD 软件创建,注重运动可行性和真实的关节驱动。