自平衡机器人
该机器人采用 Solidworks 设计,是一款自动稳定或平衡机器人。机器人顶部装有带夹爪的有效载荷容器,可将有效载荷放置并运送到所需位置。有效载荷承载能力为 500 克。机器人的运动由人工控制。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering

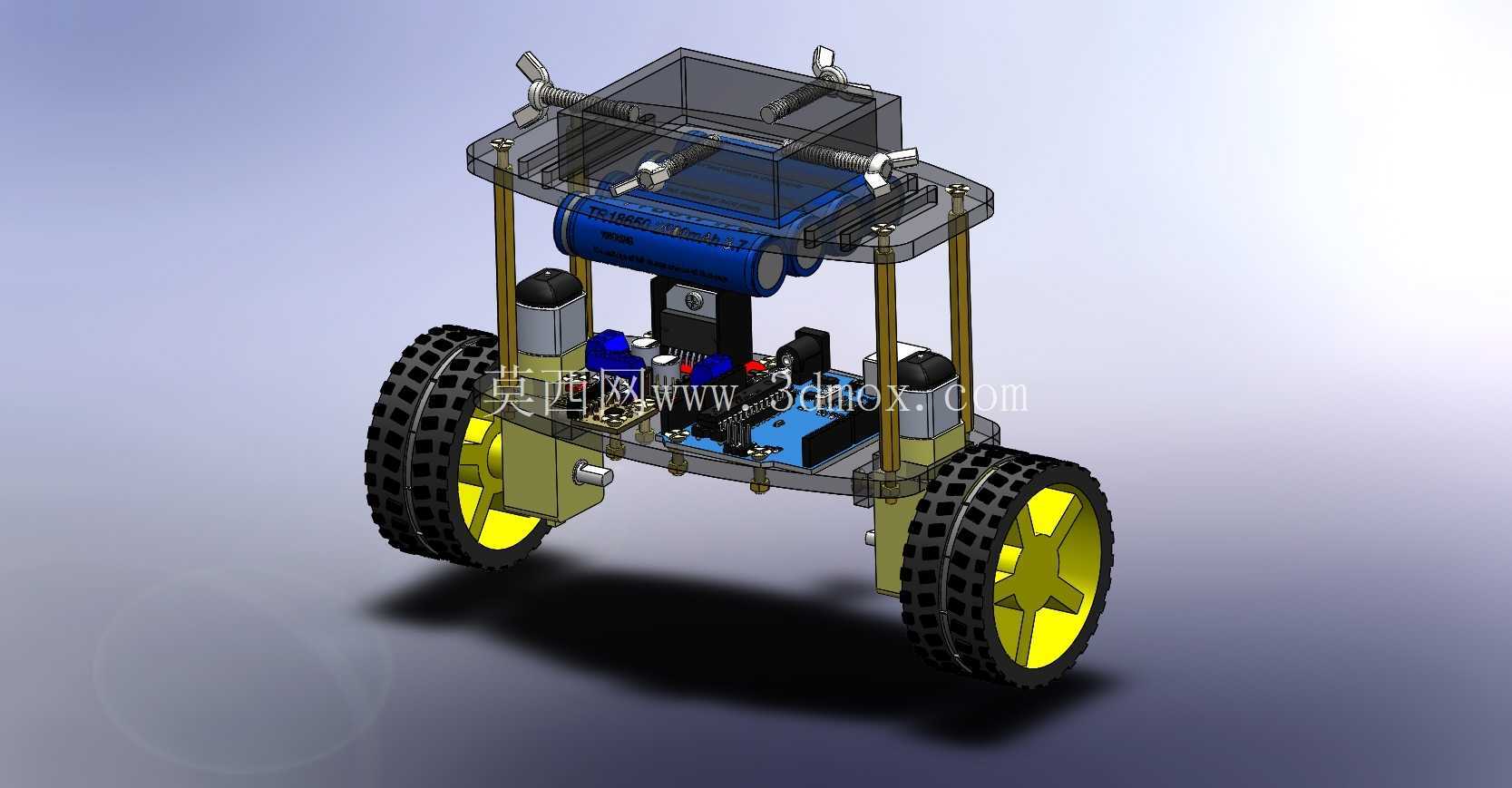
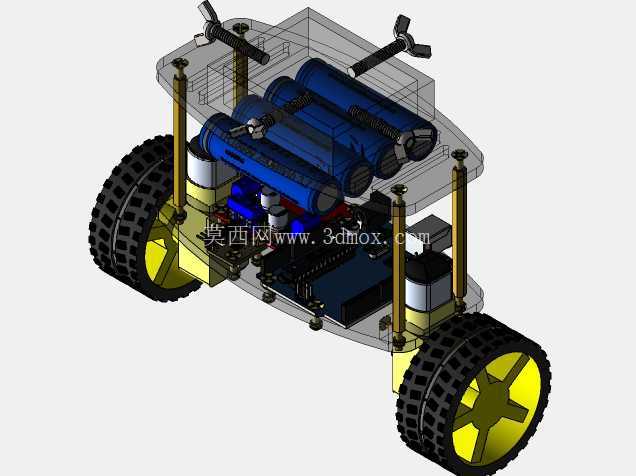
该机器人采用 Solidworks 设计,是一款自动稳定或平衡机器人。机器人顶部装有带夹爪的有效载荷容器,可将有效载荷放置并运送到所需位置。有效载荷承载能力为 500 克。机器人的运动由人工控制。