4146 原版攀岩者
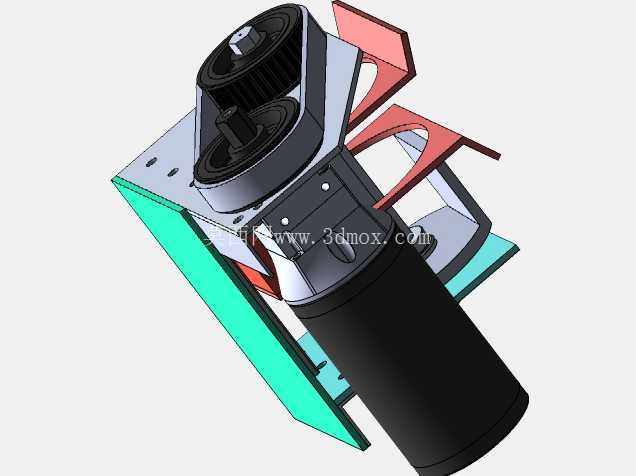
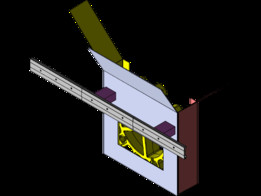
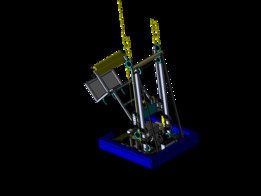
这是我们团队最初设计的攀爬机构,因为我们制作的机器人需要攀爬一根凯夫拉纤维细绳。它的工作原理是在攀爬器的一侧安装一个小型圆柱体,圆柱体上有许多镂空,形状类似字母“C”。绳子穿过圆柱体后,圆柱体会以某种方式缠绕固定绳子,防止其滑脱。然而,我们遇到了一个问题,那就是如何将绳子连接到圆柱体上,因为圆柱体的空间相对较小。因此,我们设计了一个导轨,绳子先穿过导轨,然后导轨再卡入圆柱体,确保绳子固定到位。虽然这个设计看起来很漂亮,但由于安装位置太靠后,绳子很难被拉到。不过,将线性滑轨融入设计中很有意思。图中绿色的板子安装在机器人的侧面,黑色的CIM电机则离地面最近。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS