攀爬机器人
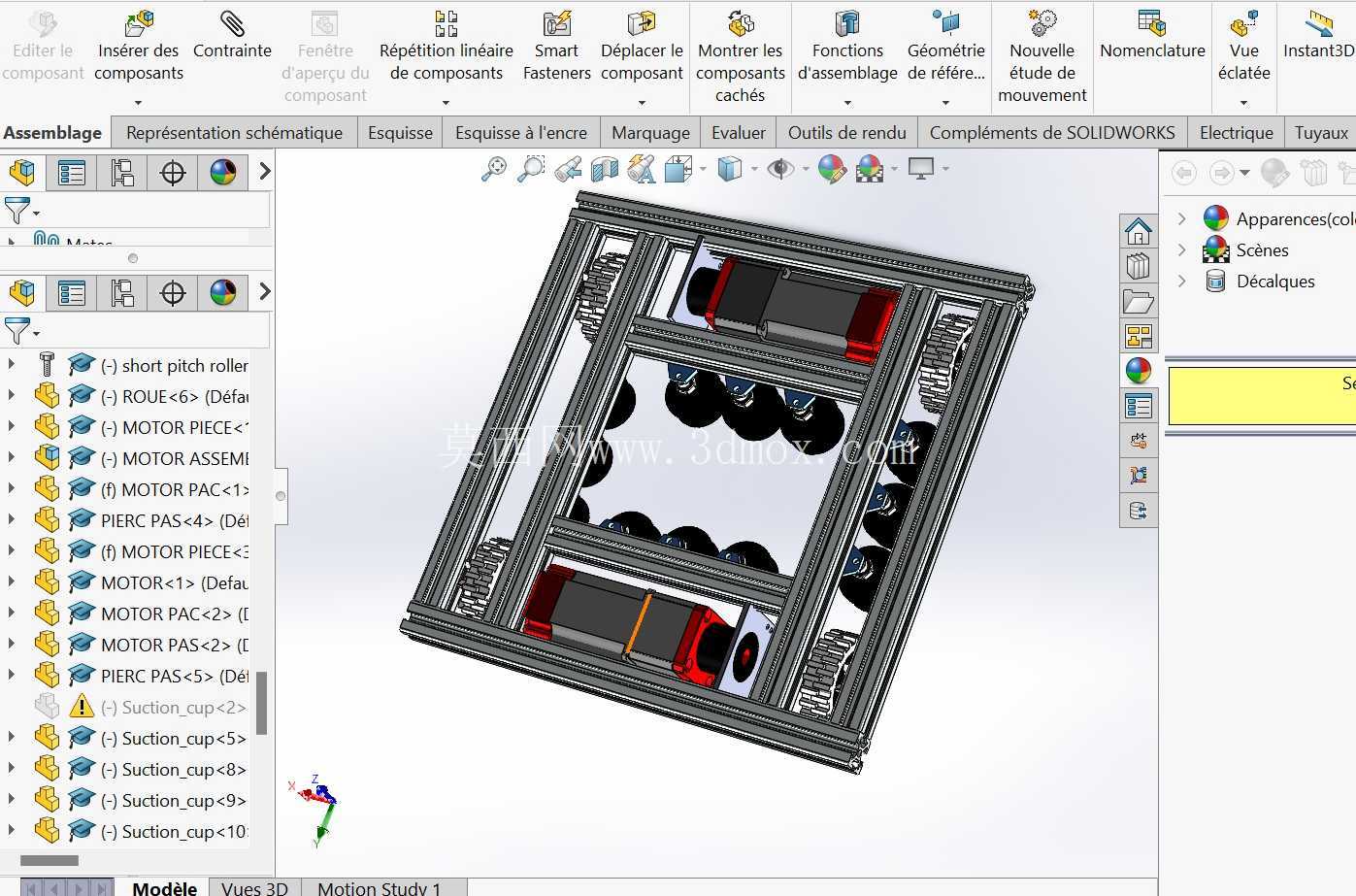
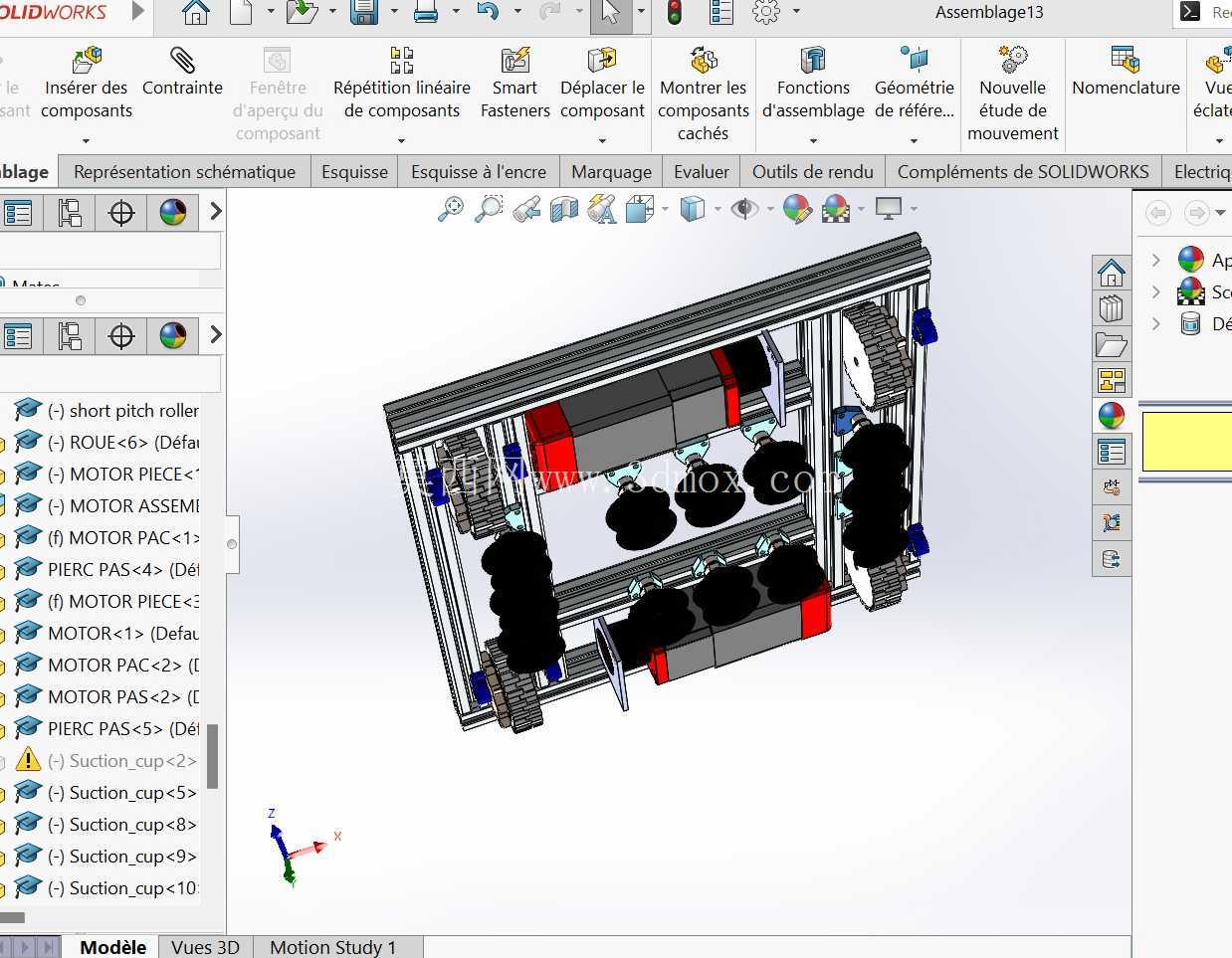
玻璃攀爬机器人利用吸盘或磁性吸附力在垂直或倾斜的玻璃表面上移动。它配备用于移动的电机、用于导航的传感器,并可能包含刷子或刮水器等清洁工具。该机器人可以远程控制或自主运行,因此非常适合高层窗户清洁和玻璃表面检查等任务。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering


玻璃攀爬机器人利用吸盘或磁性吸附力在垂直或倾斜的玻璃表面上移动。它配备用于移动的电机、用于导航的传感器,并可能包含刷子或刮水器等清洁工具。该机器人可以远程控制或自主运行,因此非常适合高层窗户清洁和玻璃表面检查等任务。