恶魔娃娃


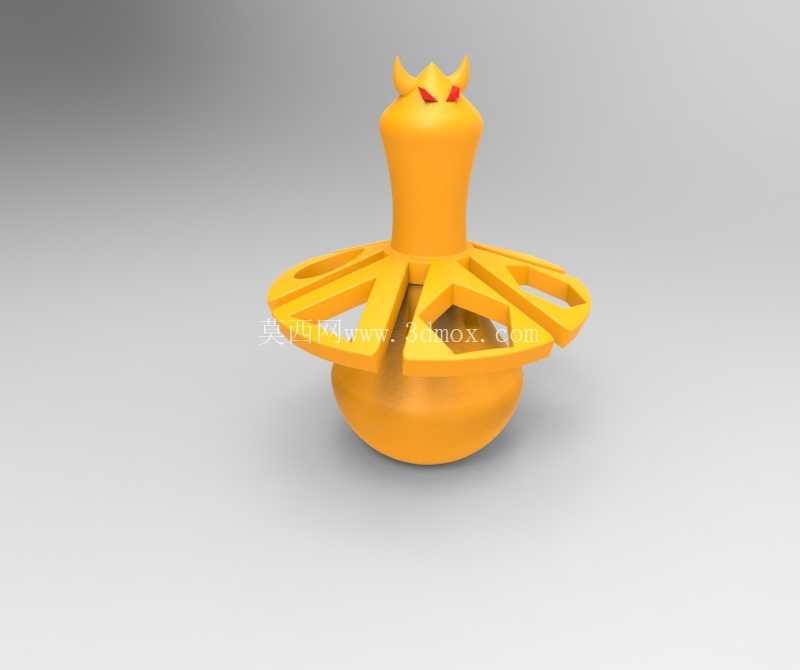
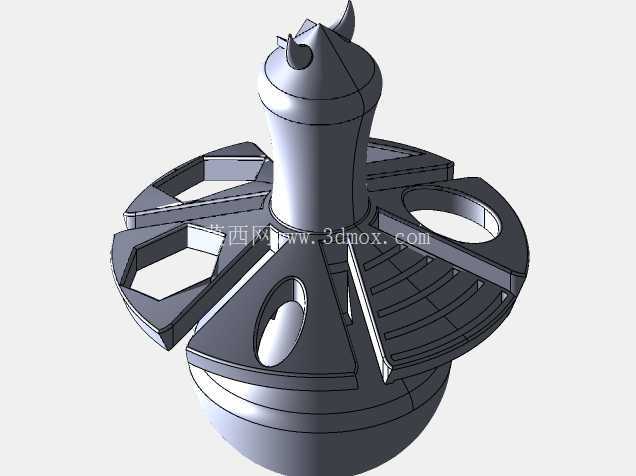
这基本上是一个机器人抓取器测试模型。模型上切割出不同形状,用于测试抓取器的多功能性。模型底部可用于测试抓取器的夹持范围,整体高度可用于测试其工作范围。该模型可轻松使用3D打印技术制造。真空吸盘抓取器可通过球体底部的平面进行测试。由于该模型由塑料制成,因此无法测试磁性抓取器。测试完成后,该模型还可以用作镇纸。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering