汤普森大厅 T001
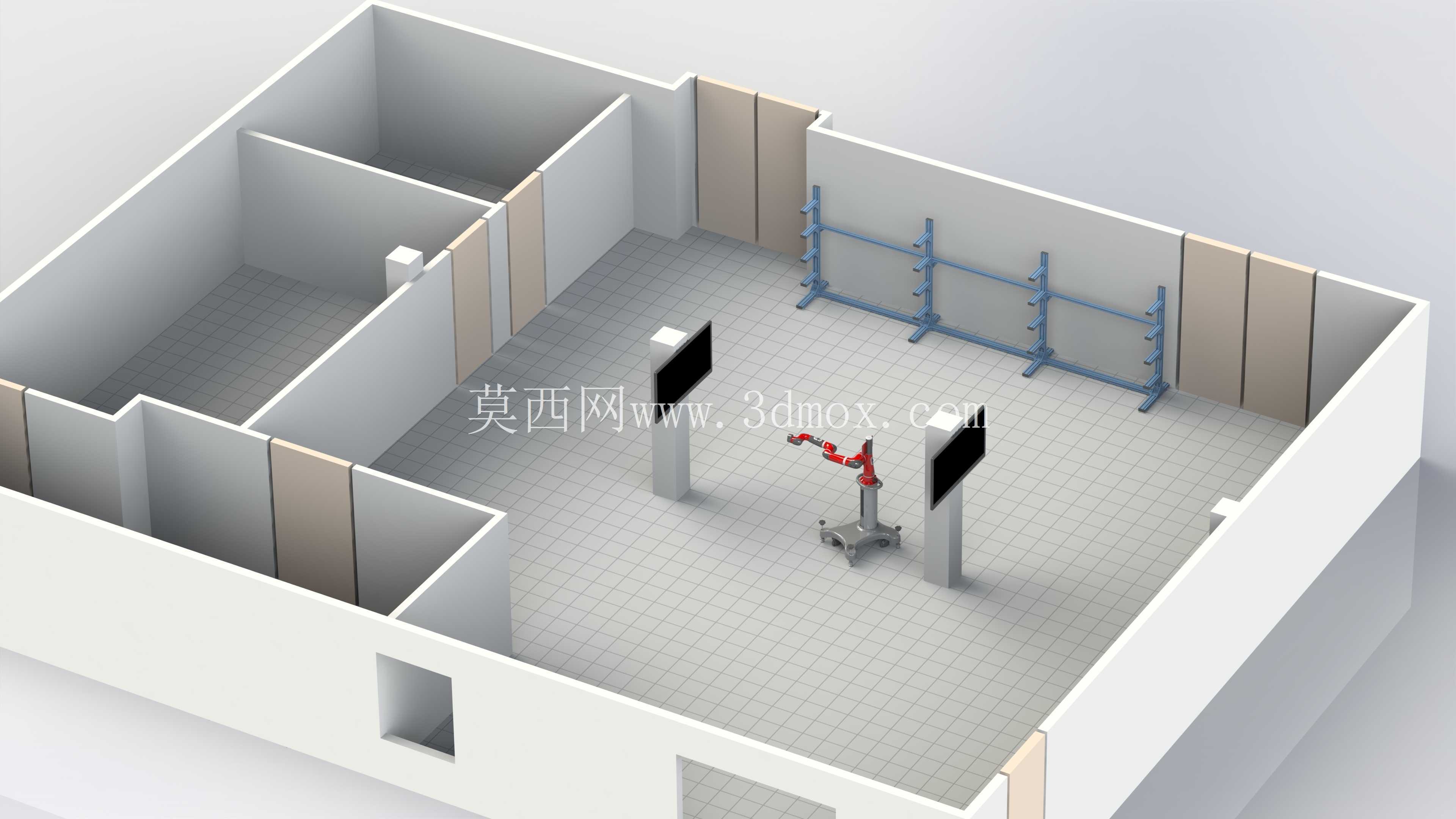
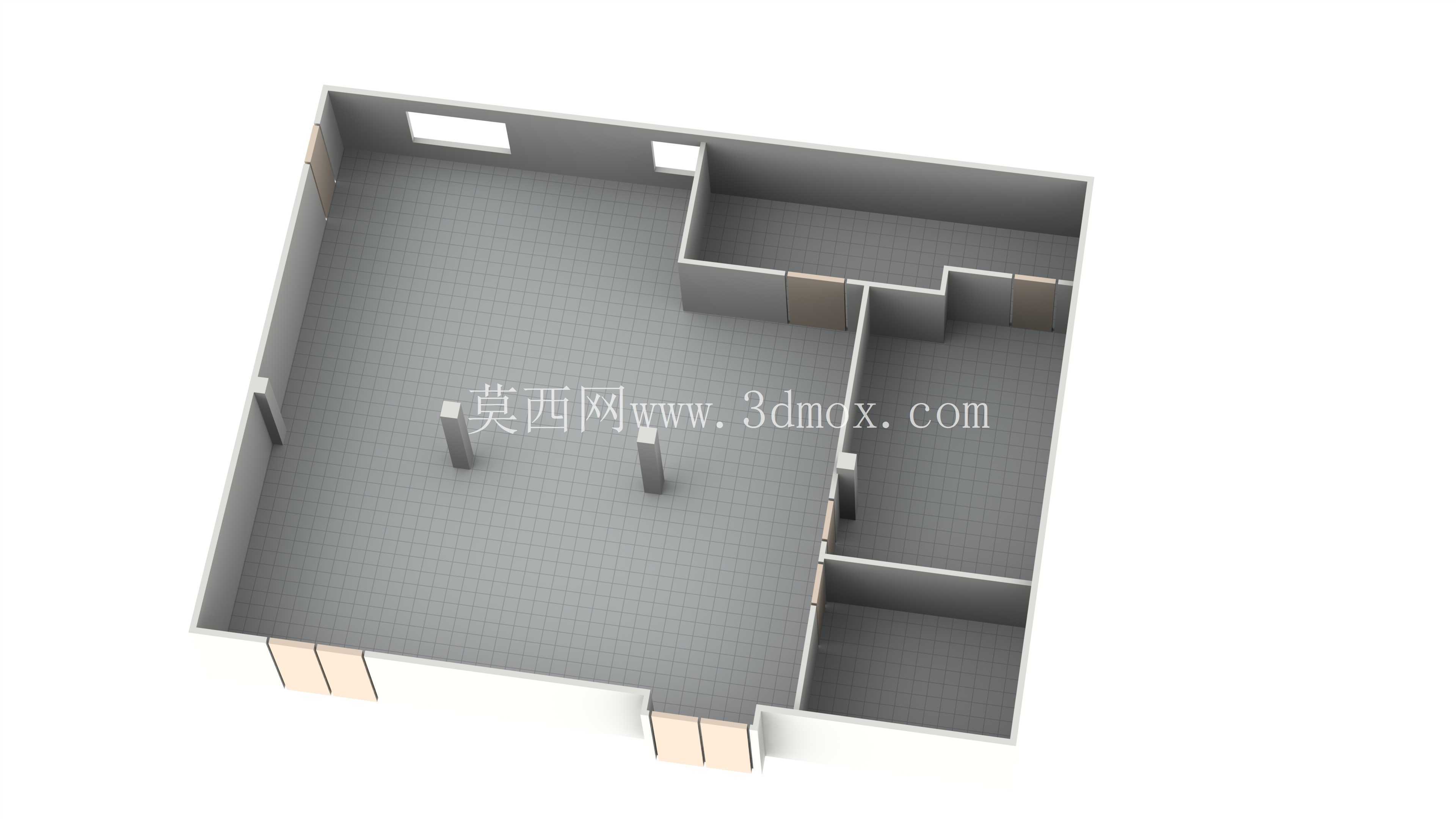
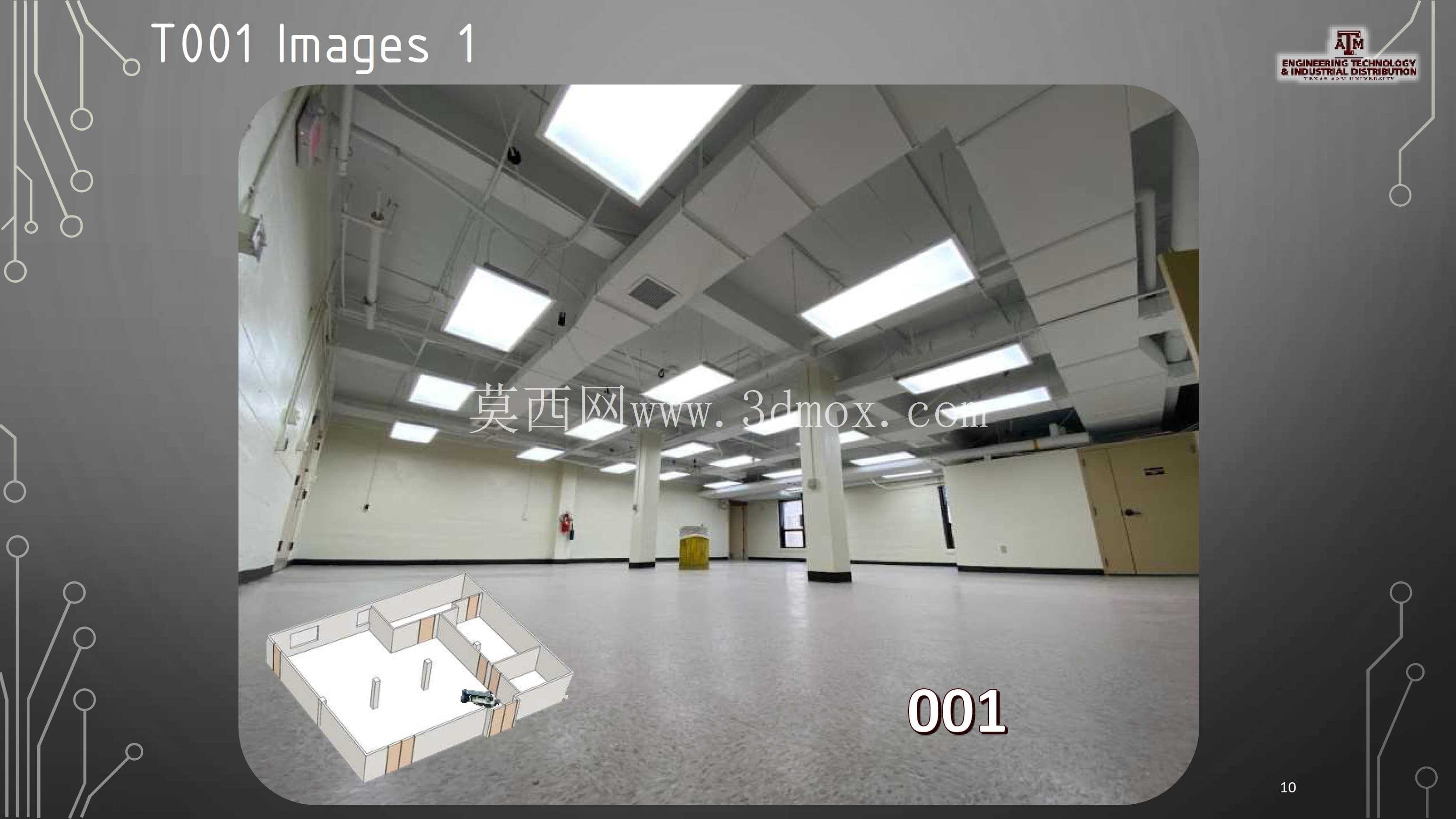

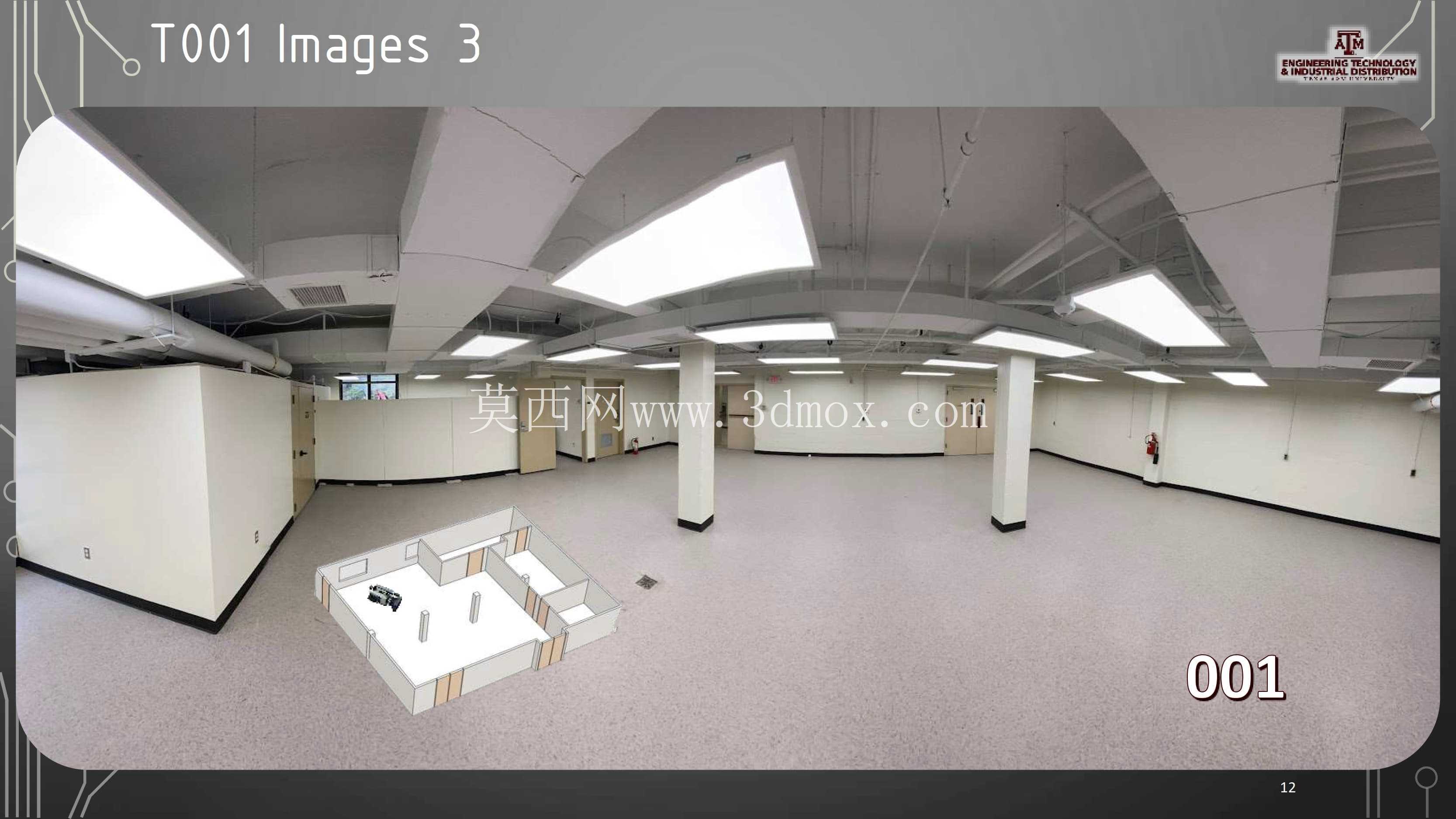
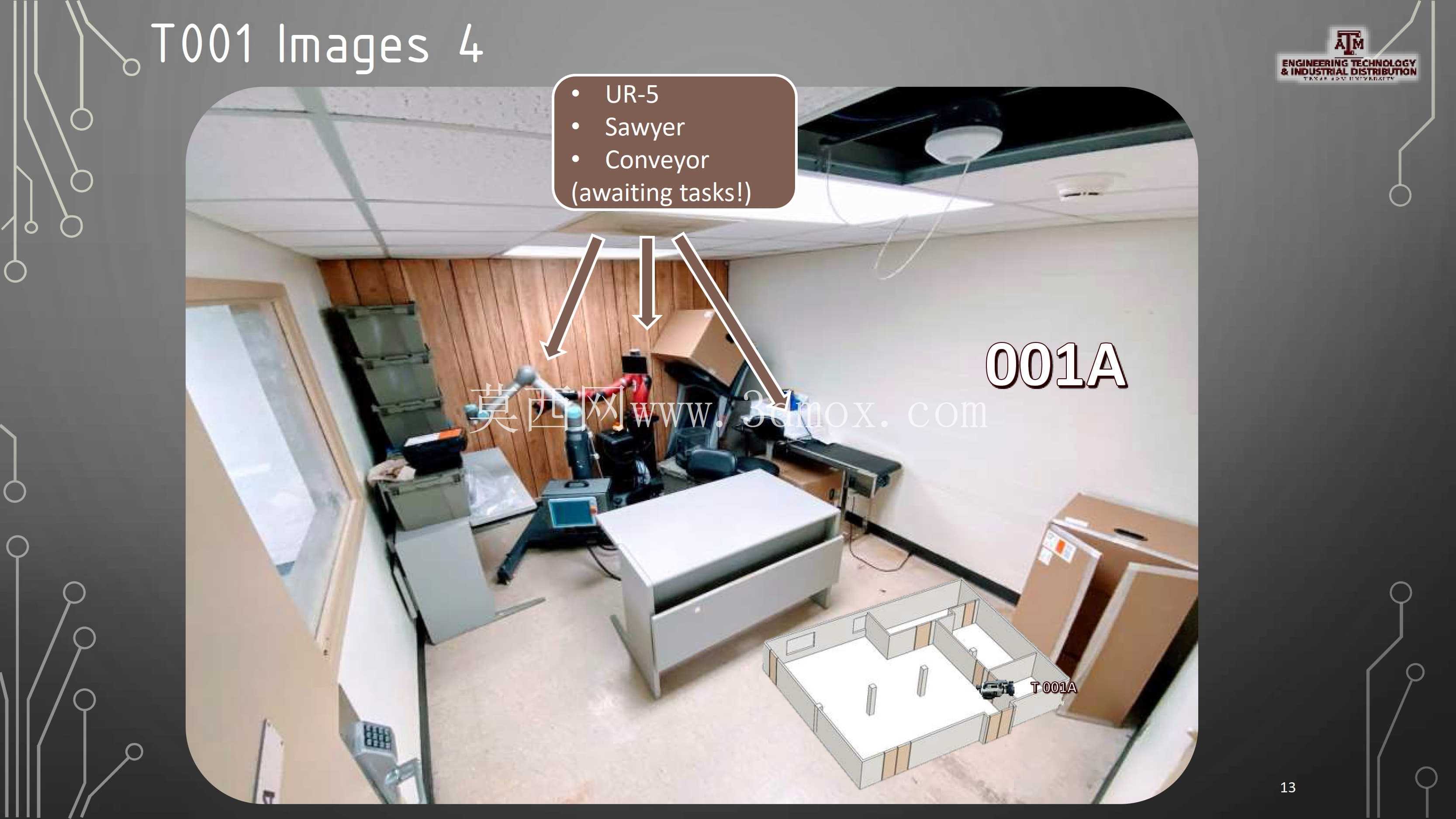
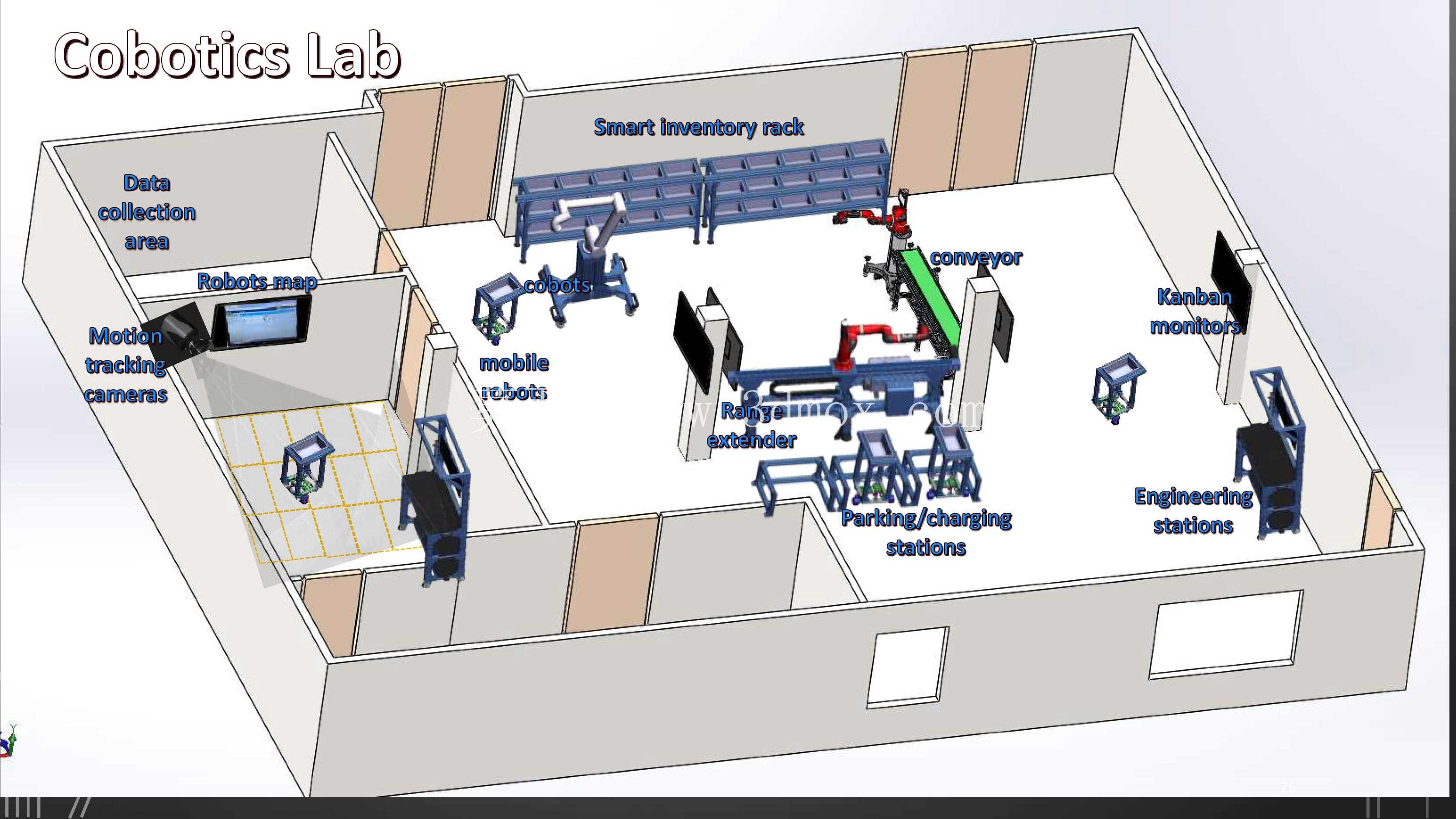
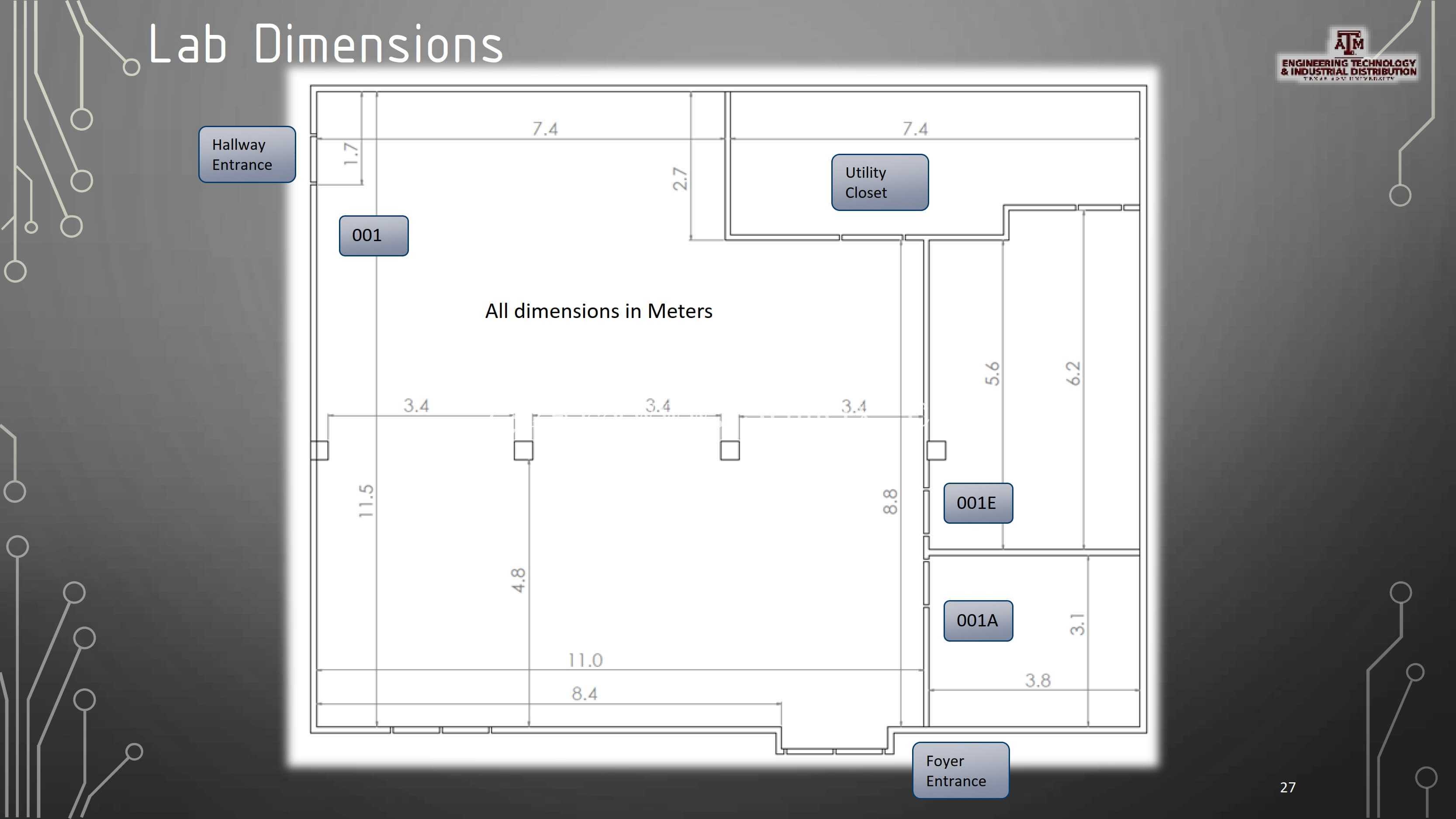

德州农工大学协作机器人实验室;M――这间位于一楼的实验室空间最初由David M及其同事计划在2023年左右建成,用于协作机器人研究,但计划有所变更,最终未能实现。该模型能够精确测量空间尺寸,对未来的机器人规划仍然有用。学生们在编写自主机器人或机器人集群的程序时,经常会发现拥有一个空间模型对于开发导航软件、障碍物检测以及其他机器人功能细节非常有帮助。2025年更新:添加了2021年实验室规划的PDF文件;添加了图片,并清理了SolidWorks文件。装配文件仅包含实验室空间和电视机――它是一个很好的模板,可以用来将实体模型排列成一个现成的装配体。我希望这个存档对某些人有用。如果这个模型对您有帮助,请留言!更多内容请访问:https://qr.net/openlabproject
------分隔线----------------------------
- 上一篇:距离传感器本体
- 下一篇:S6-15 (KAREI NUT M6)

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS,Other,STEP / IGES