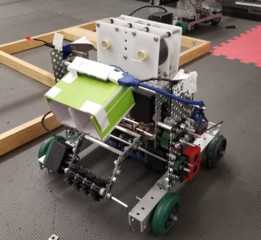
脱轨机器人
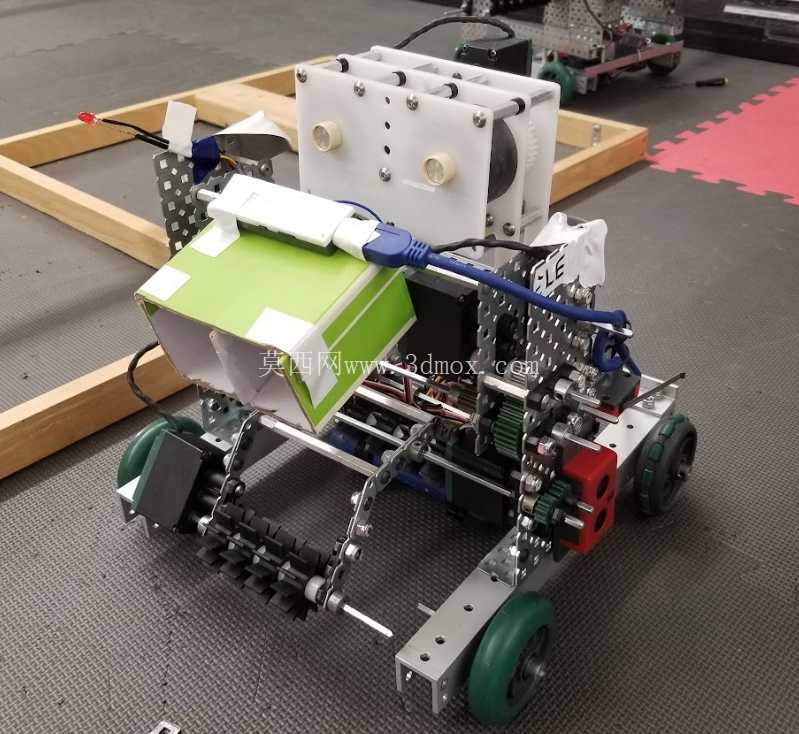

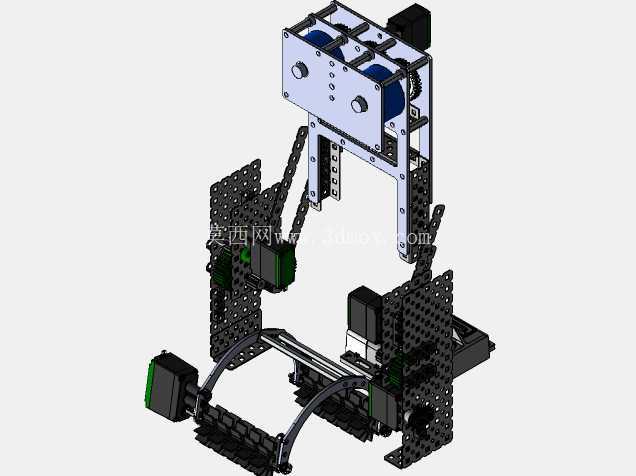
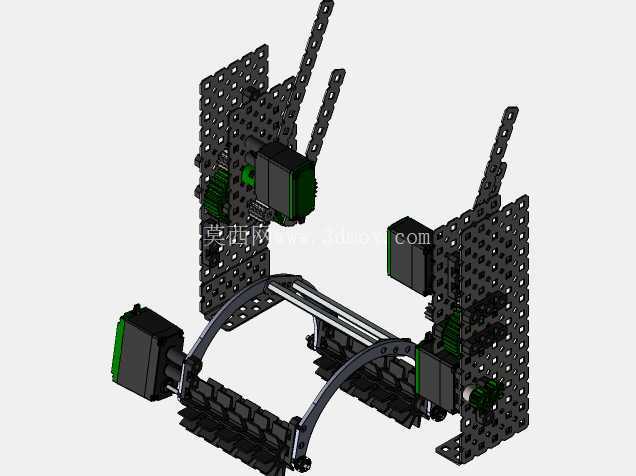
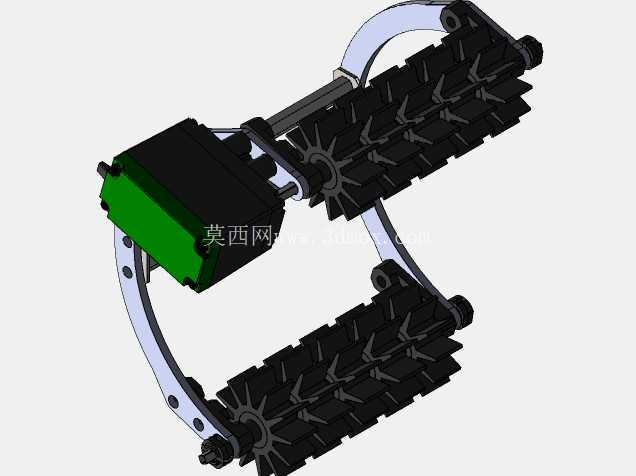
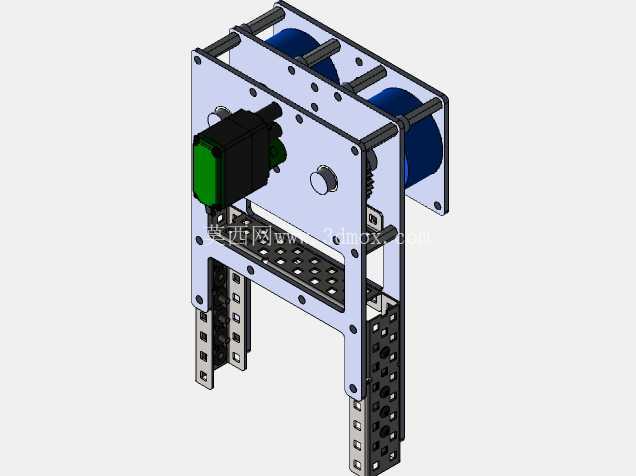
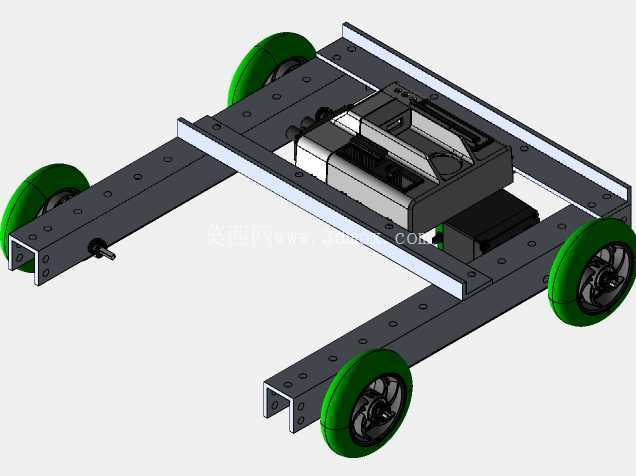
这款机器人专为“脱轨”游戏而设计。它吞下球后,会爬上一根1英寸的铝制轨道。然后,它会使用定制的光敏电阻传感器检测两个指示灯中是否有一个亮起,并根据检测结果将球推入相应的位置。机器人由定制零件和VEX金属零件组合而成。
标签:
------分隔线----------------------------
- 上一篇:3 Eksenli 机器人
- 下一篇:植物营养分析机器人 PNAbot

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering