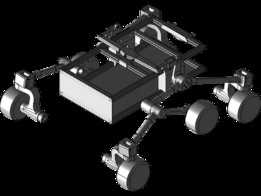
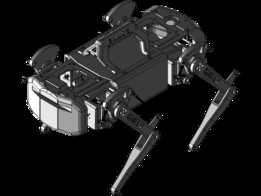
四足机器人
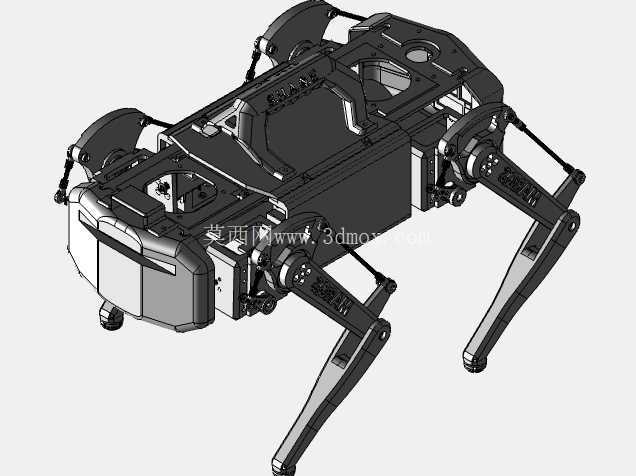
团队项目:7人(3名电子工程专业,4名机械工程专业)主要项目入选Ramp;D.Robodog -gt;利用开源模型,打造了一款功能齐全的四足机器人,其模块化附件能够模拟步态机制,并运用逆运动学原理。-gt;该机器人可应用于远程监控(远程呈现)。我们已完成ROS的URDF文件创建。-gt;我们实现了前进、后退、坐立等动作。机器人采用我们自主3D打印的结构,能够承载500克的有效载荷。技术栈:树莓派(带流媒体摄像头)、Arduino、锂电池、12个20kg・cm扭矩的舵机(每条手臂3个)。
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES