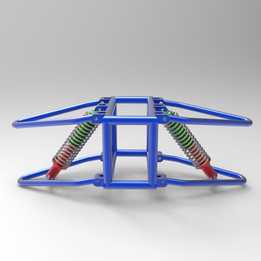
SolidWorks 中的 Stewart 平台 | 6 自由度运动




?? SolidWorks 中的 Stewart 平台机构 | 6 自由度运动系统 在本视频中,我将展示使用 SolidWorks 完成 Stewart 平台(六足机器人)的完整设计、装配和运动仿真。? 视频内容包括:所有组件的分解和折叠动画;装配平台的轨道旋转;展示执行器运动的侧视图;功能齐全的 6 自由度 (6-DOF) 演示。这种并联机器人机构广泛应用于飞行模拟器、运动测试平台和精密加工。观看流畅的执行器过渡和逼真的运动仿真――所有这些都是在 SolidWorks 中设计和制作的。?? 使用软件:SolidWorks(设计、装配和动画)?? 设计及渲染:Moshaddek Hossain ― SolidWorks 认证助理及 3D 设计师


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering