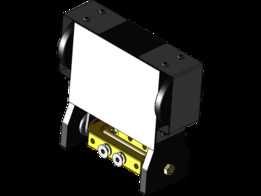
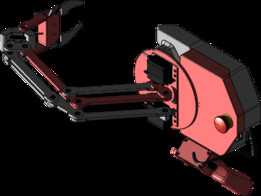
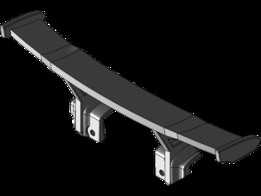
机械臂
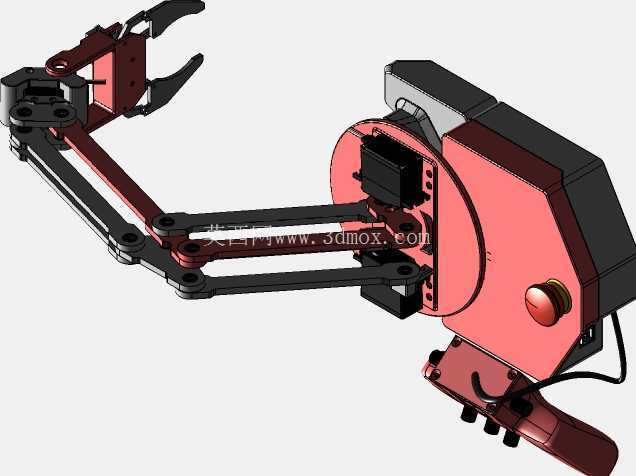





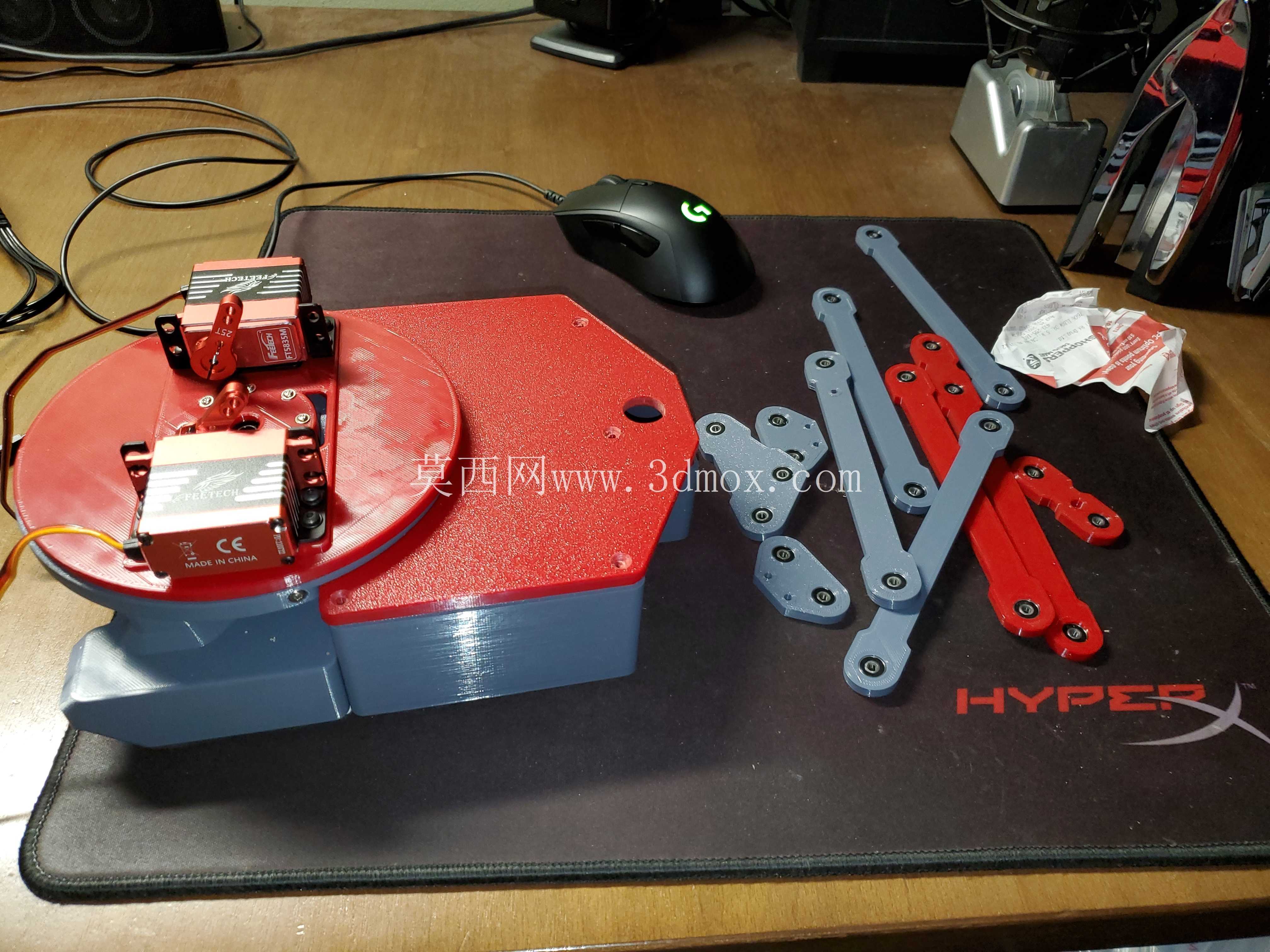

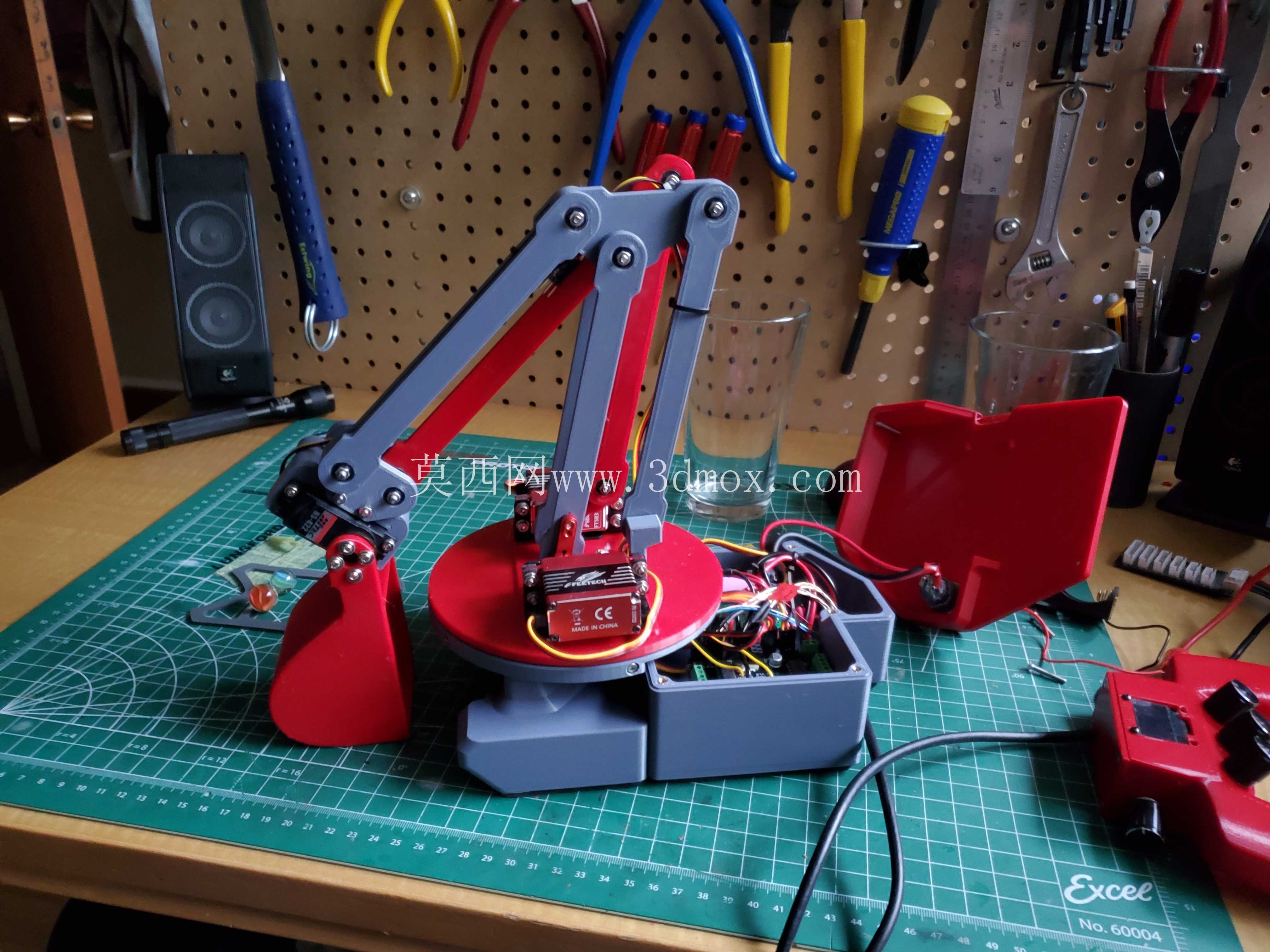
这是我的第一个桌面大小的机械臂原型。目前,它有 4 个自由度,由定制遥控器上的电位器控制。我选择使用Arduino来处理电位器的模拟输入,并将PWM信号输出发送到舵机,因为目前它只能通过远程控制。我计划通过将我在这里构建的机制与 ROS 环境集成来扩展这个项目,为这个小家伙创建一个自动化流程。规格:名称: Albert类型: 4连杆 - 5 DOF 肩部舵机扭矩: 35kg-cm at 7.2v*肘部舵机扭矩: 35kg-cm at 7.2v*手腕舵机扭矩: 3.3kg-cm at 4.8v*手指舵机扭矩: 1.8kg-cm at 5v*腰部舵机扭矩: 16.5kg-cm at 5v 9v*工作电压: 7.2v-(两节18650电池) / 5v-(来自微控制器)
标签:
------分隔线----------------------------
- 上一篇:Tecnolar 4英寸 R412 轮毂
- 下一篇:FTC 6518 货运狂潮机器人

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering