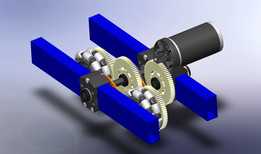
FRC传动系统“踢轮”
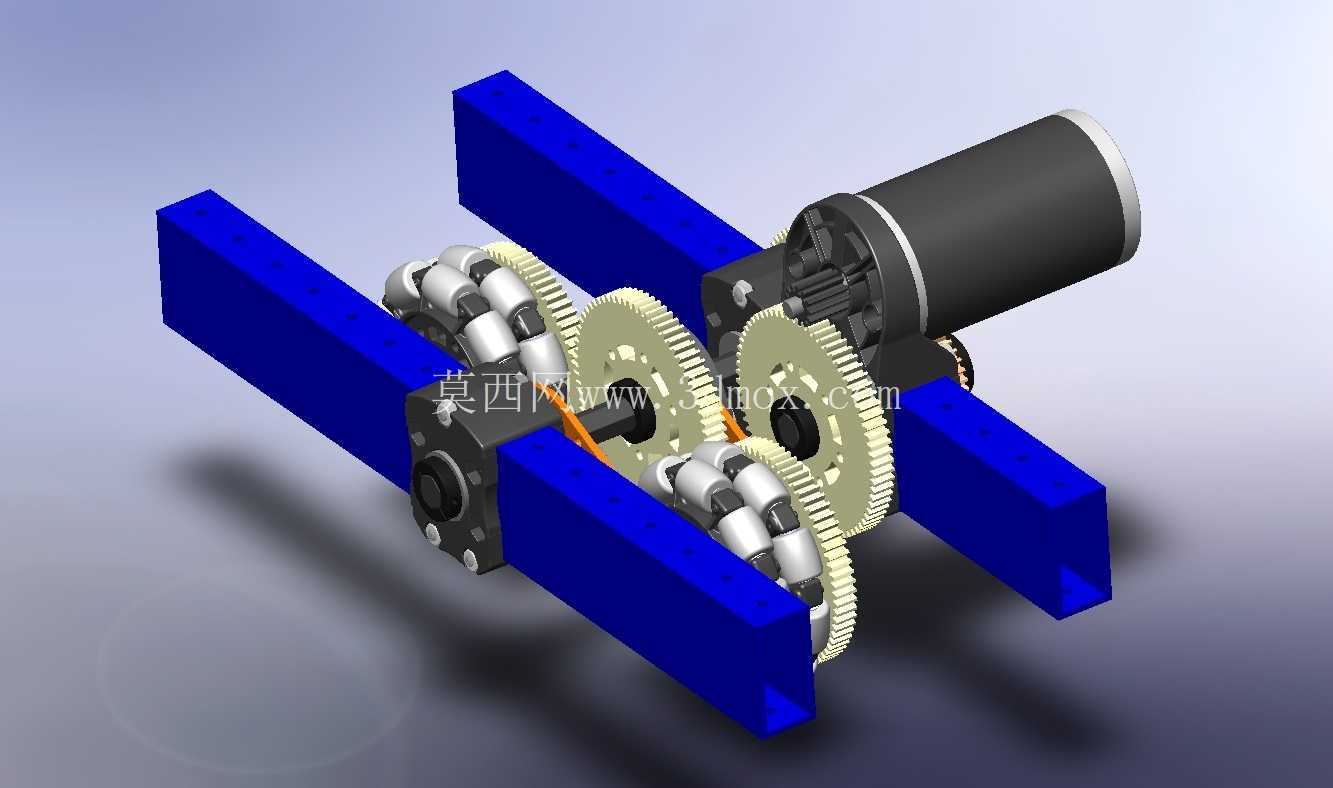
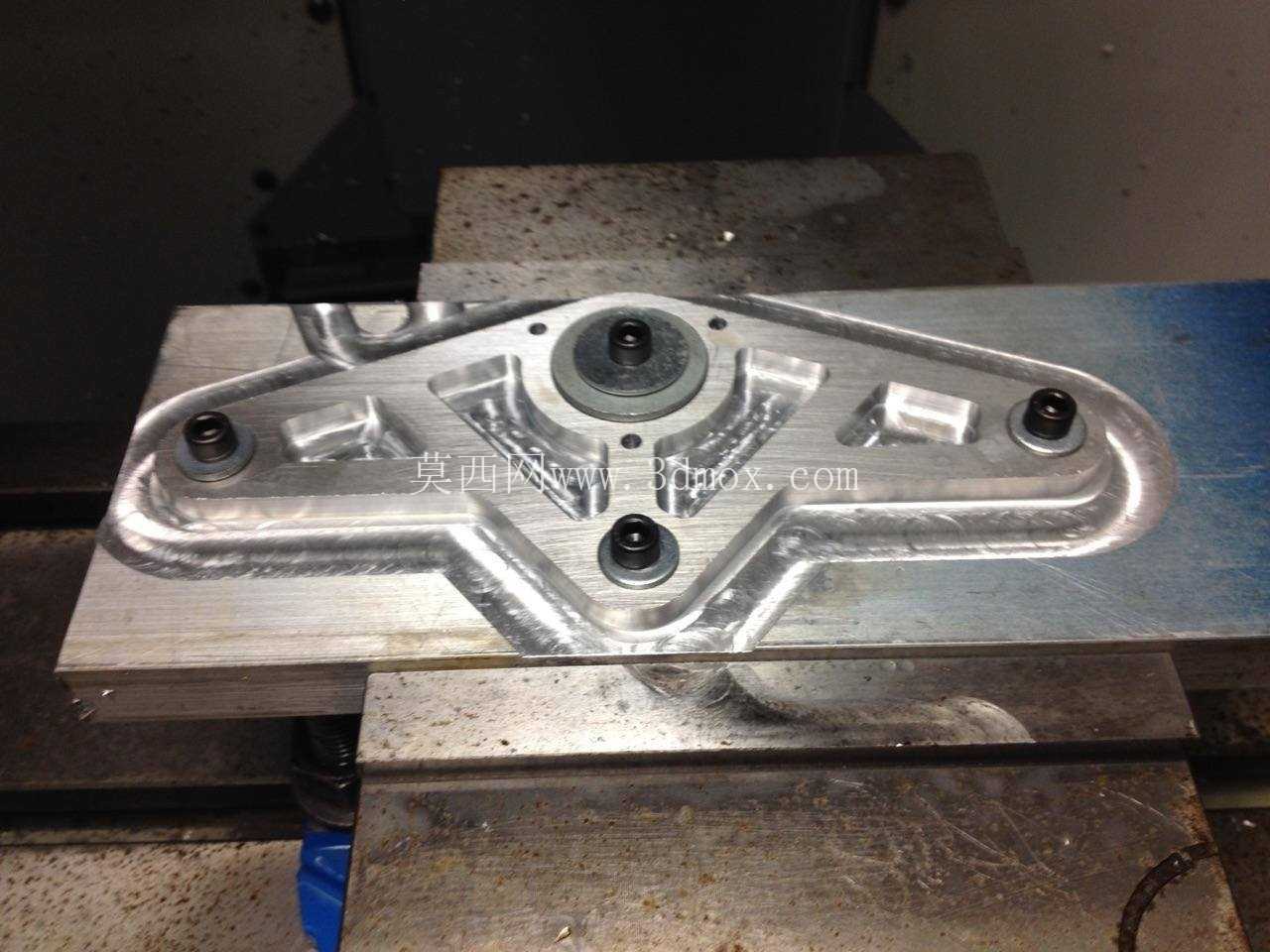

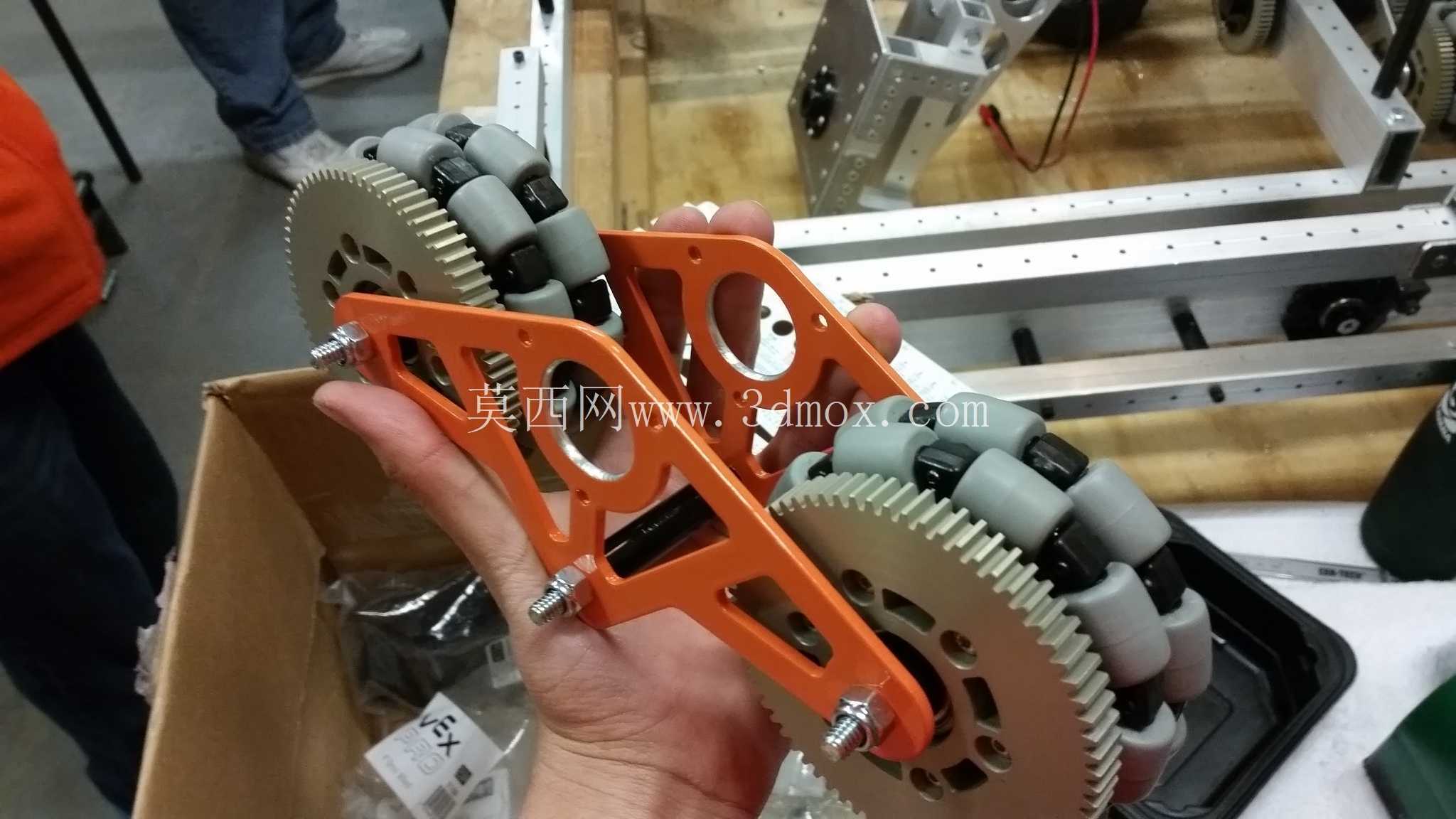


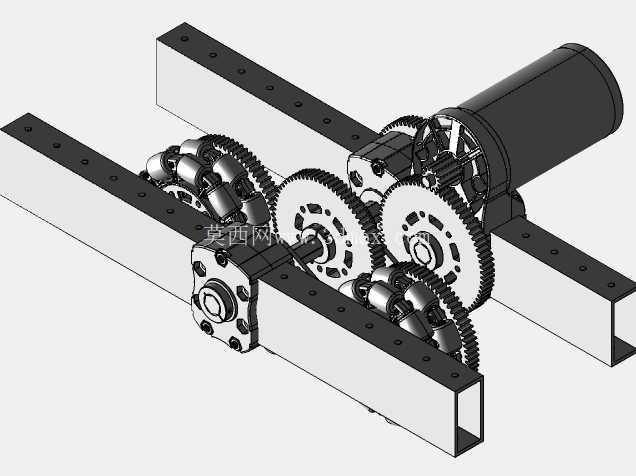
在2015年的FRC比赛“回收冲刺”(Recycle Rush)中,我们决定采用全向驱动底座,以便在赛场上拥有更大的机动性。我的任务是设计并制造一个能够实现这一目标的装置。由于这是我或我们团队的任何人第一次做这件事,我向其他队伍寻求灵感。大多数队伍都使用气动系统来升降他们的全向扫射装置,但我感觉这可能会增加太多复杂性,所以我决定以148 RoboWrangler机器人前一年的驱动系统为基础,采用同样的倾斜方式进行设计。这个设计非常成功,也是我们对那台机器人唯一满意的地方。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering