单轴平衡机器人
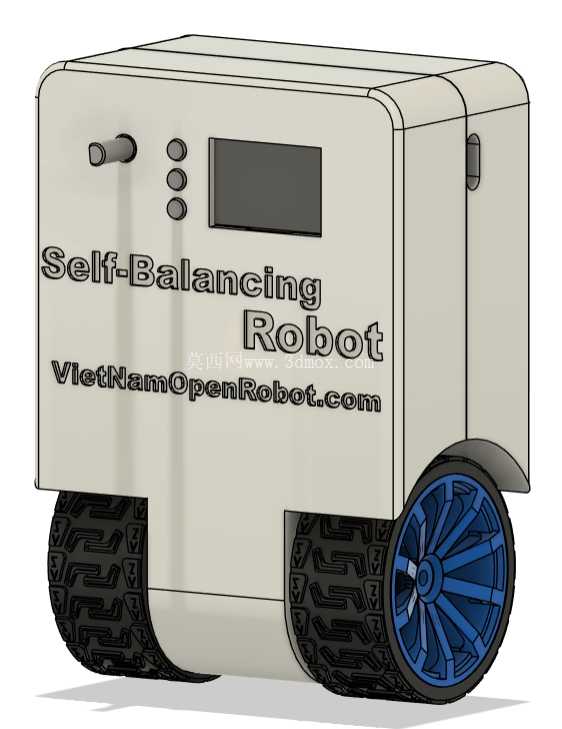
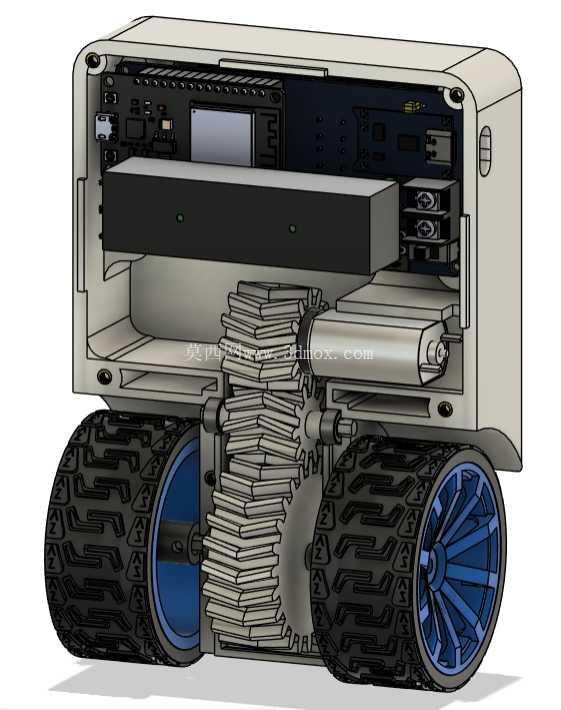
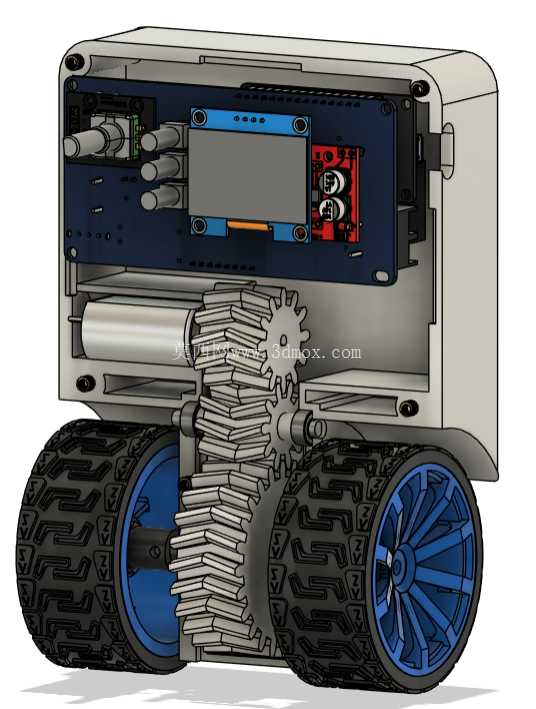

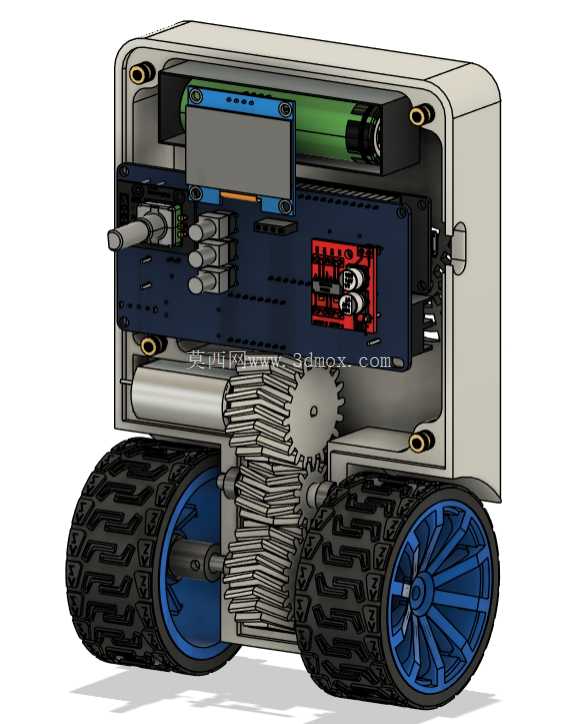

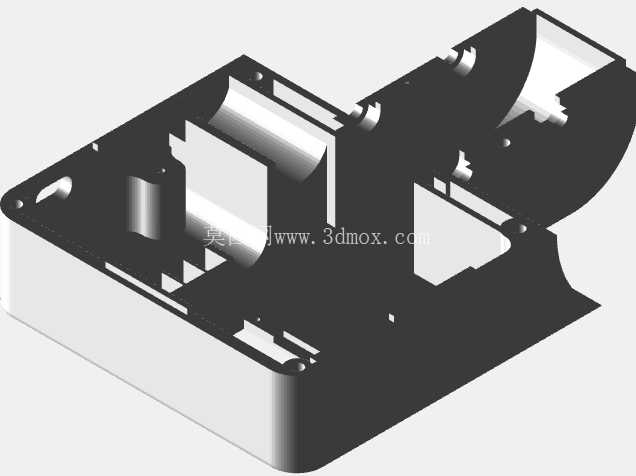
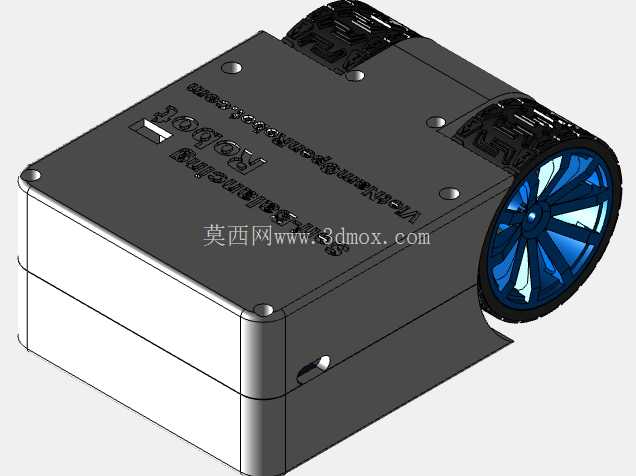
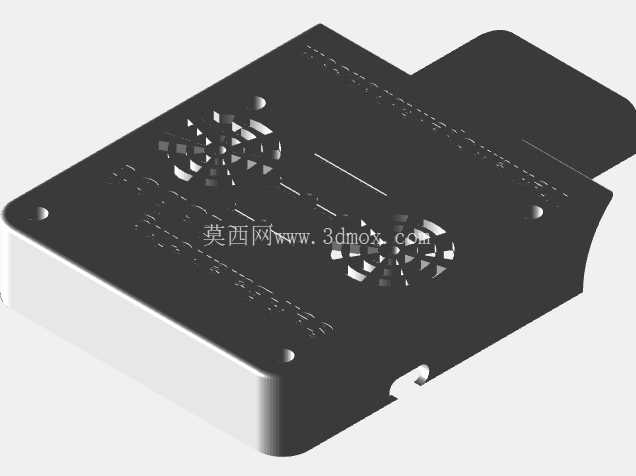
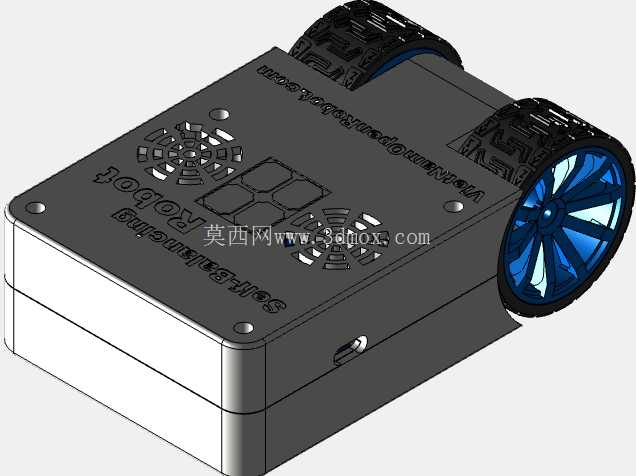
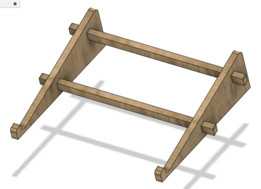
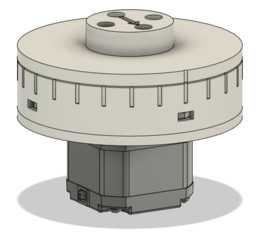
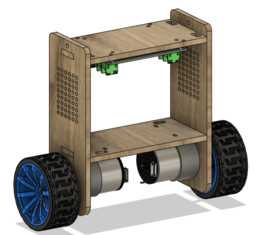
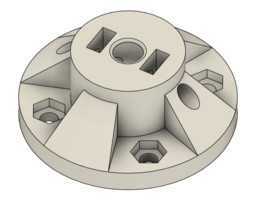
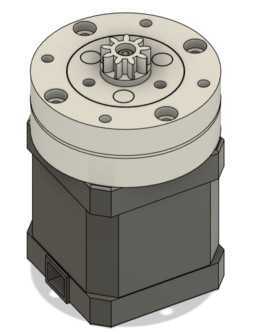
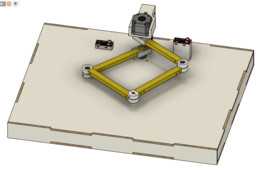
为了延续自平衡机器人系列,今天我将介绍一个完全不同的版本。这个机器人是我最近一个项目的一部分,它仅使用一个电机就能实现自平衡。通过显示屏和按钮,可以直接调整PID系数,无需重新上传代码。这个机器人的目的是辅助学习PID控制相关的课程,让学习者直观地理解每个系数如何影响系统。在第一版中,我使用了1:1齿轮比的人字齿轮。然而,它的扭矩相对较低。因此,在第二版中,我将齿轮比改为1:2。所有零件均采用3D打印技术制造,并以合理高效的方式组装而成。感谢您的关注。请点赞并关注,以便及时了解未来的项目。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,STL