六角形,NASA太空任务的机器人组装和装备
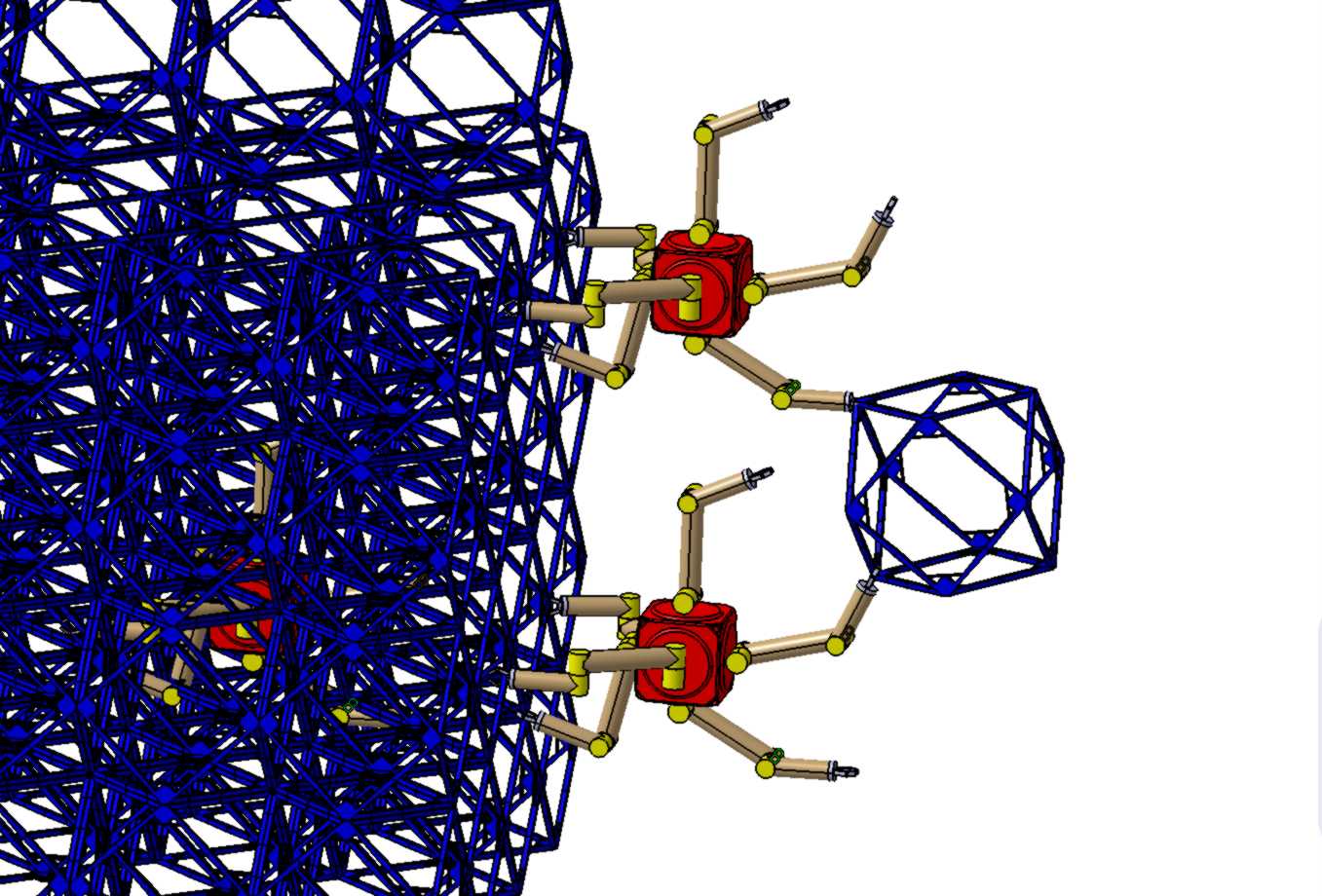
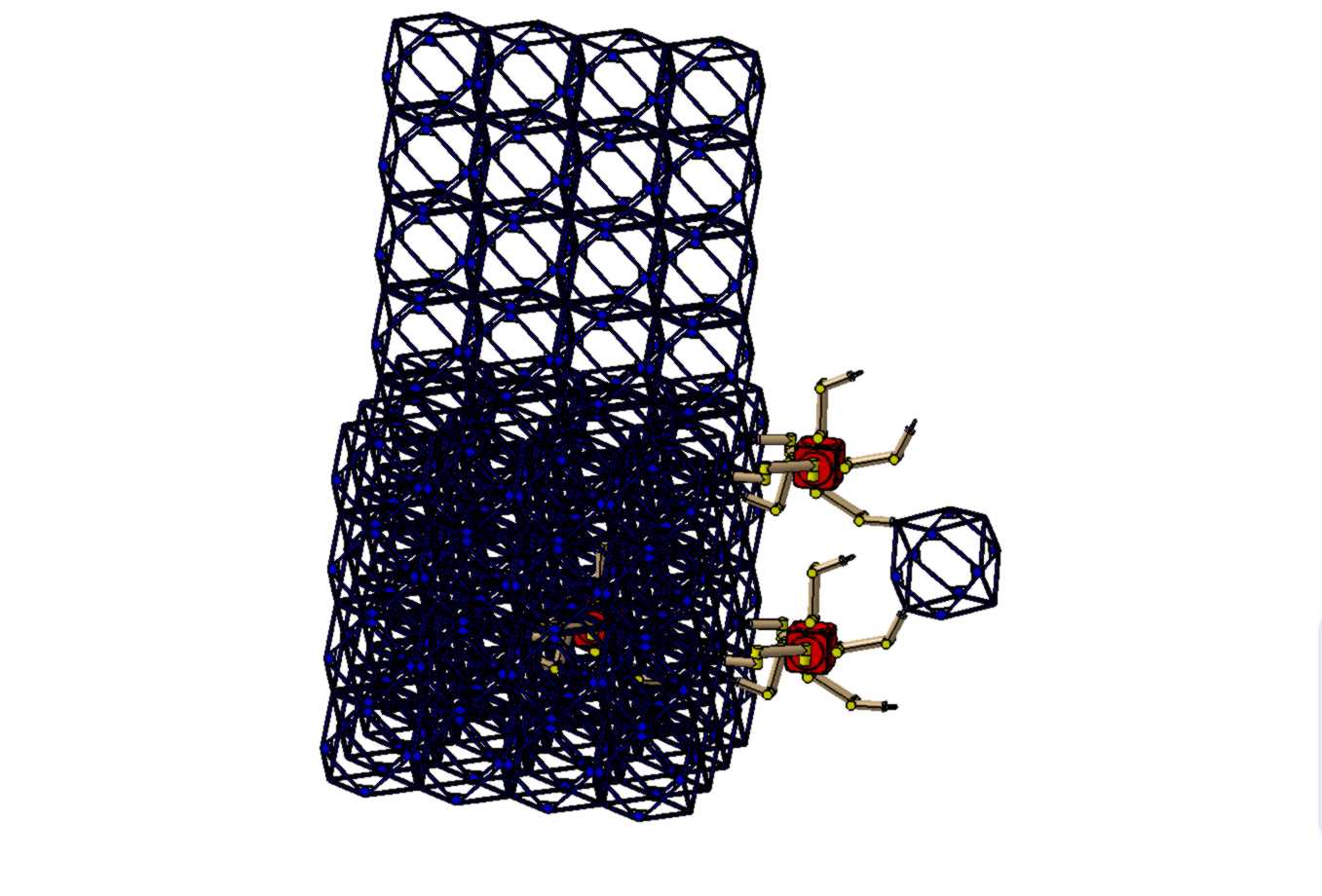
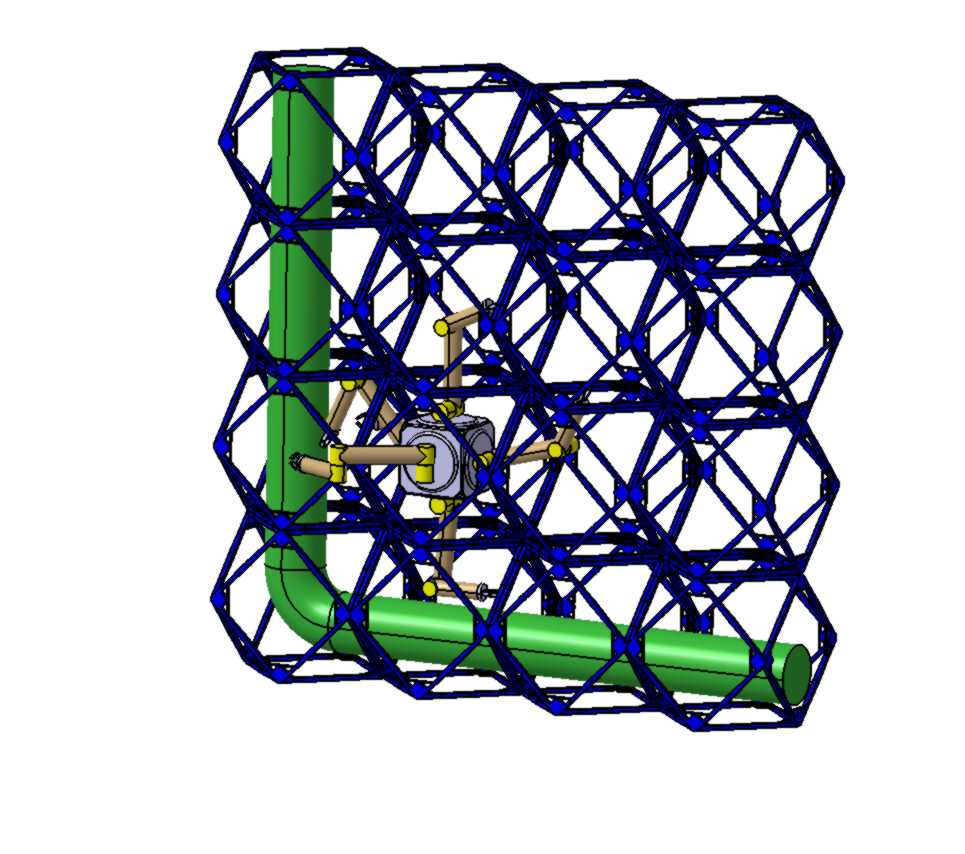
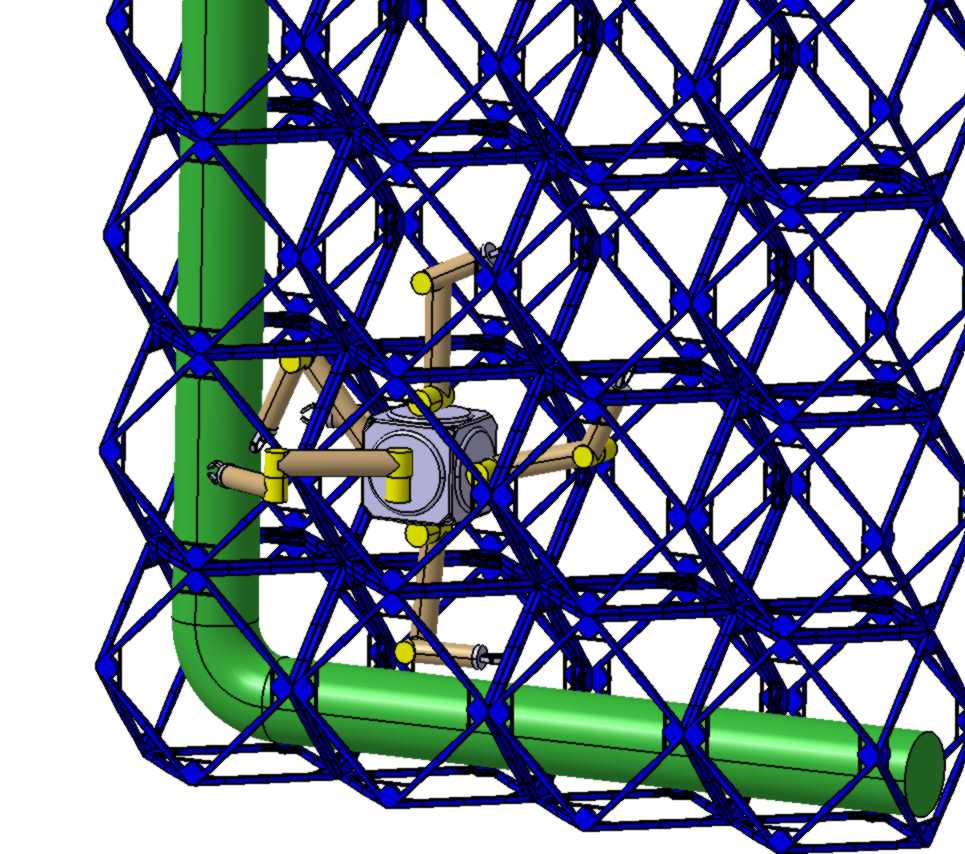
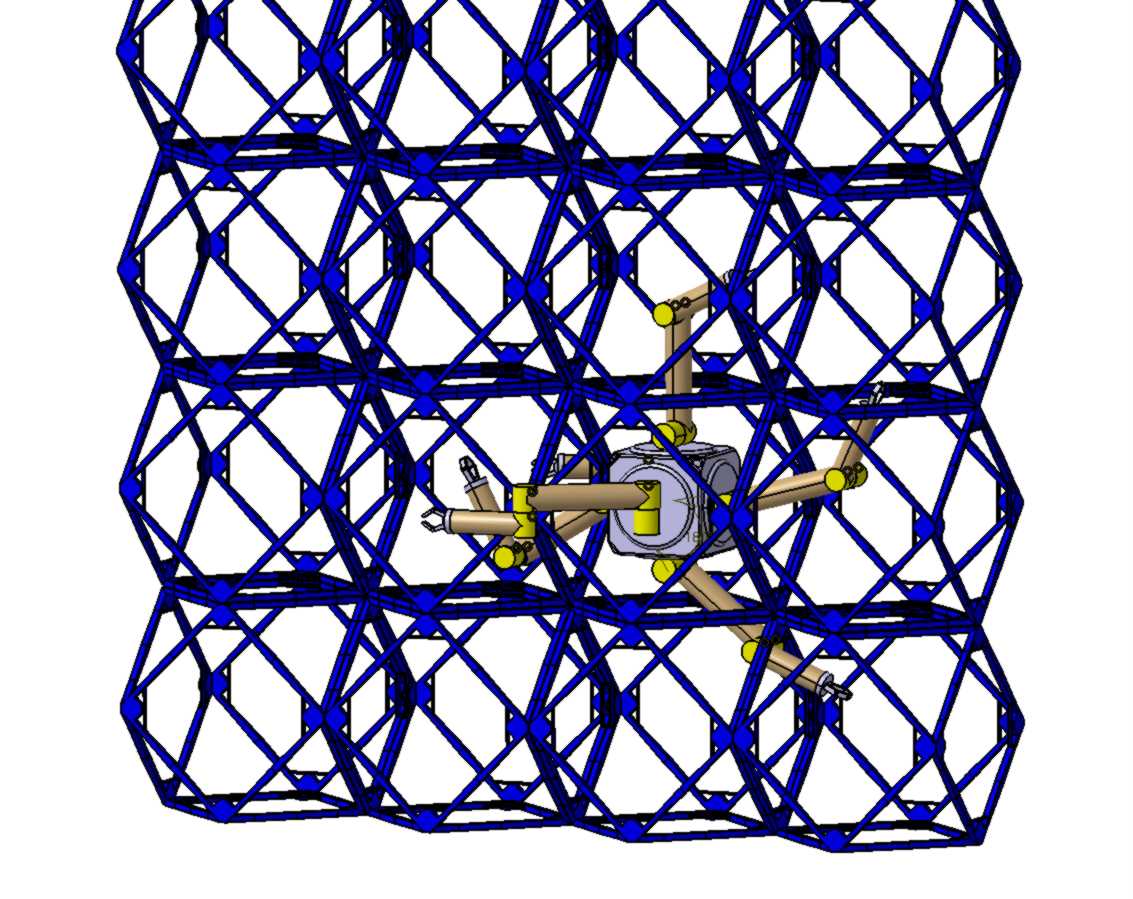
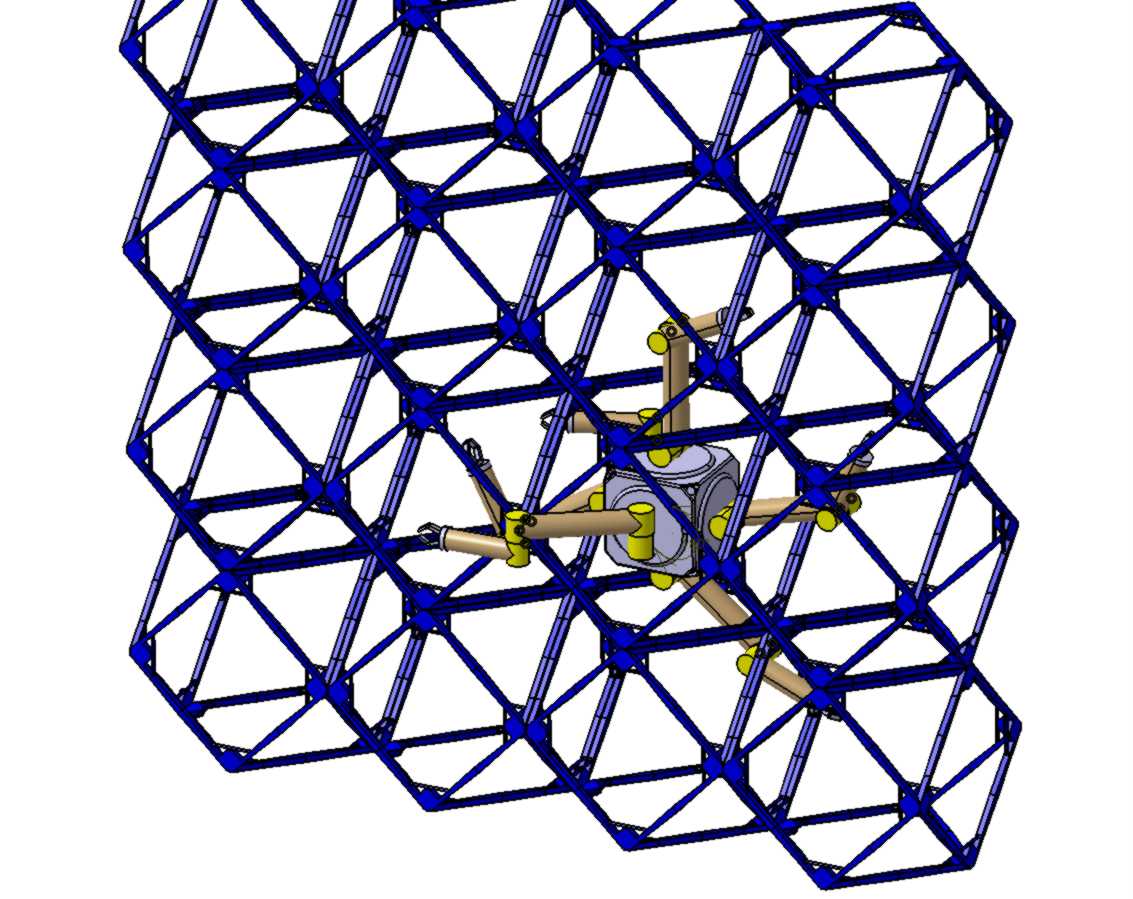
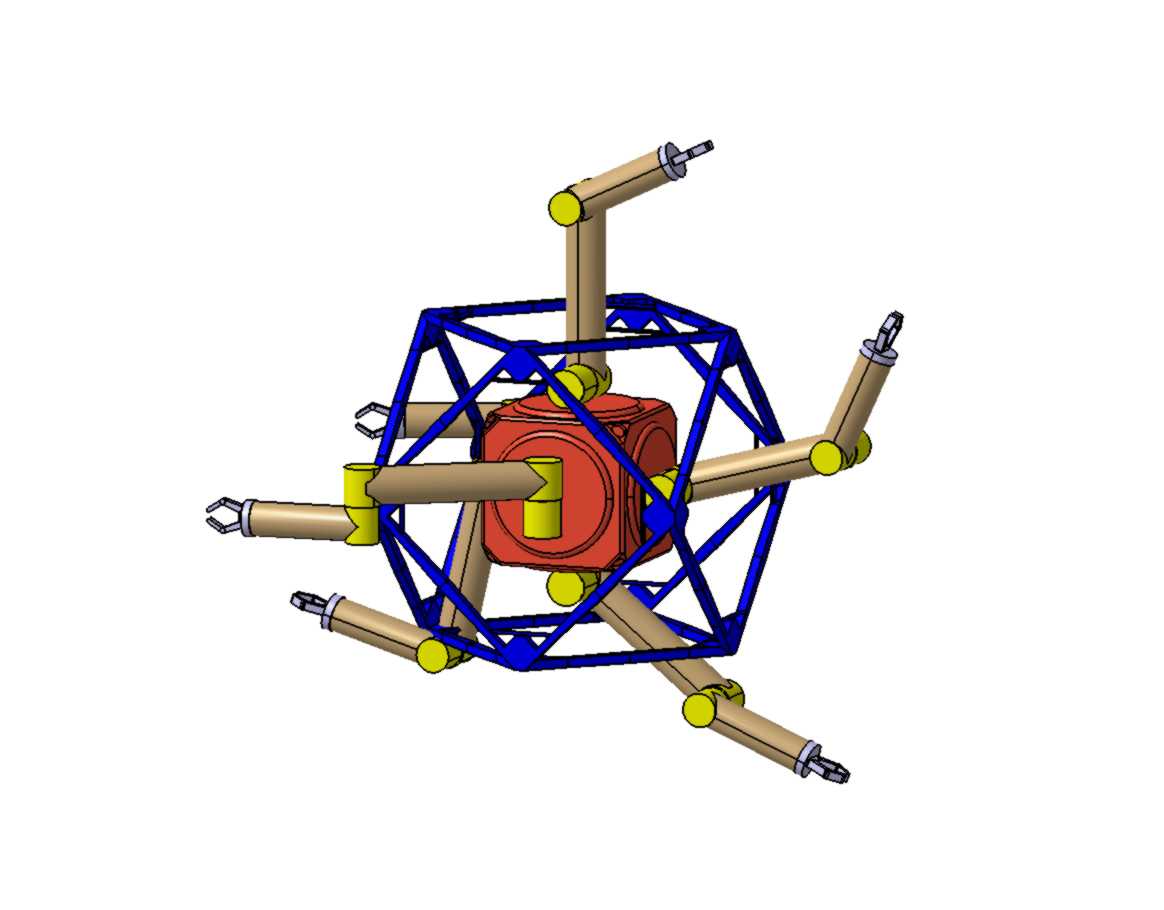
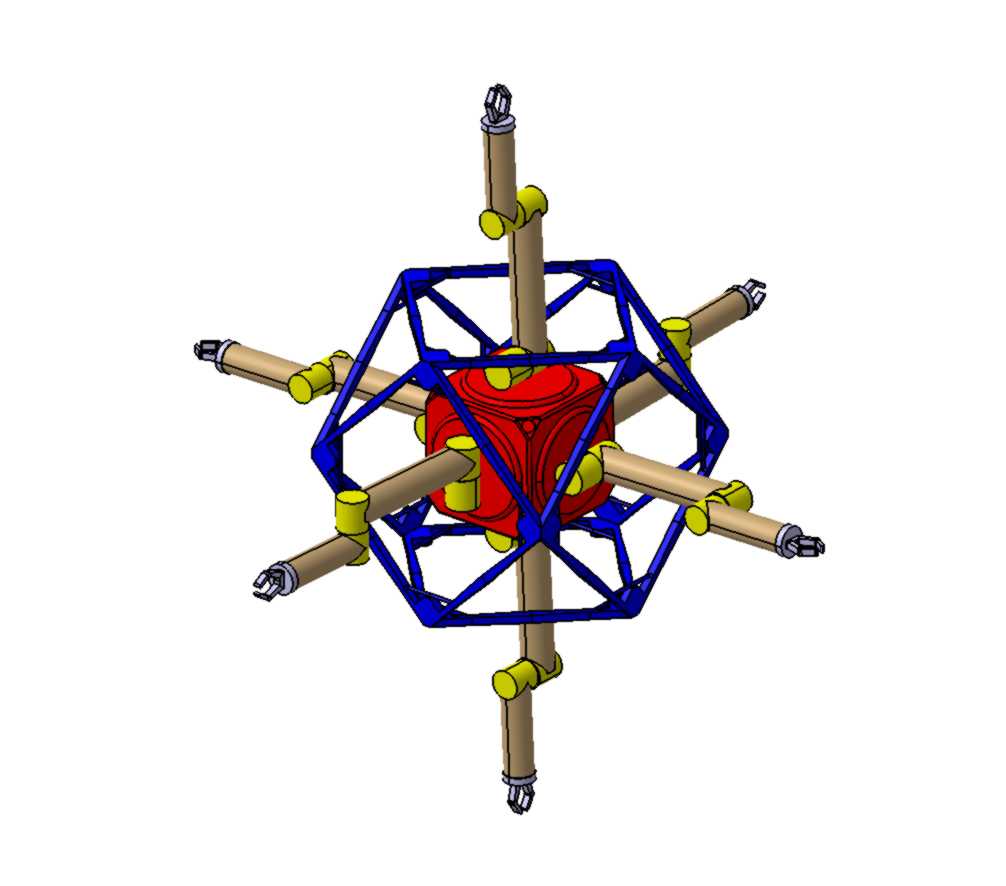
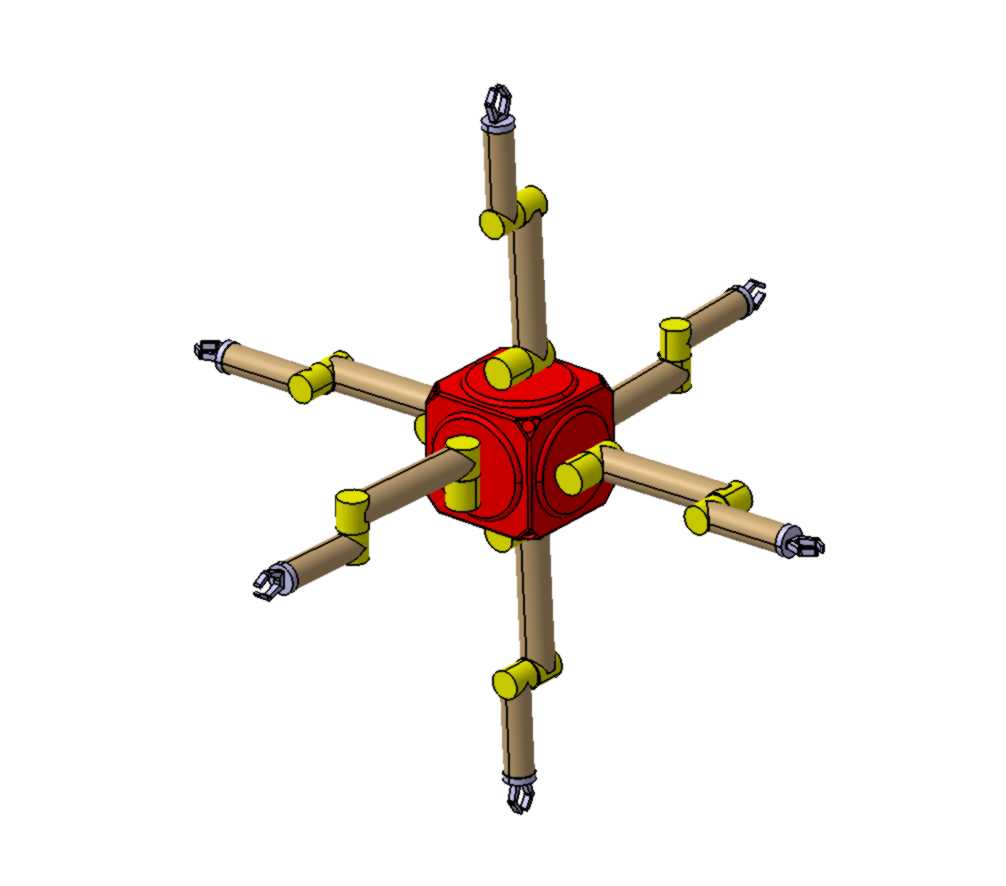
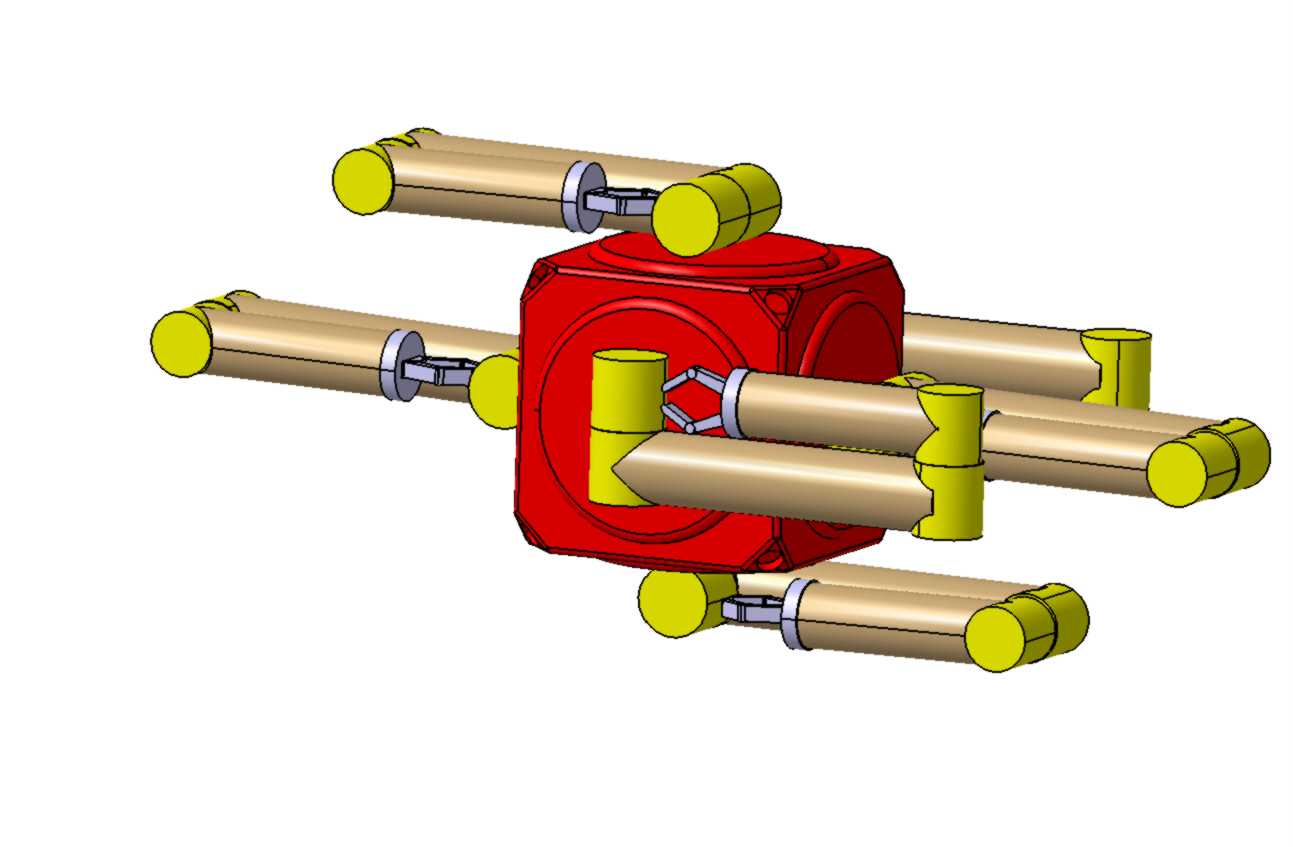
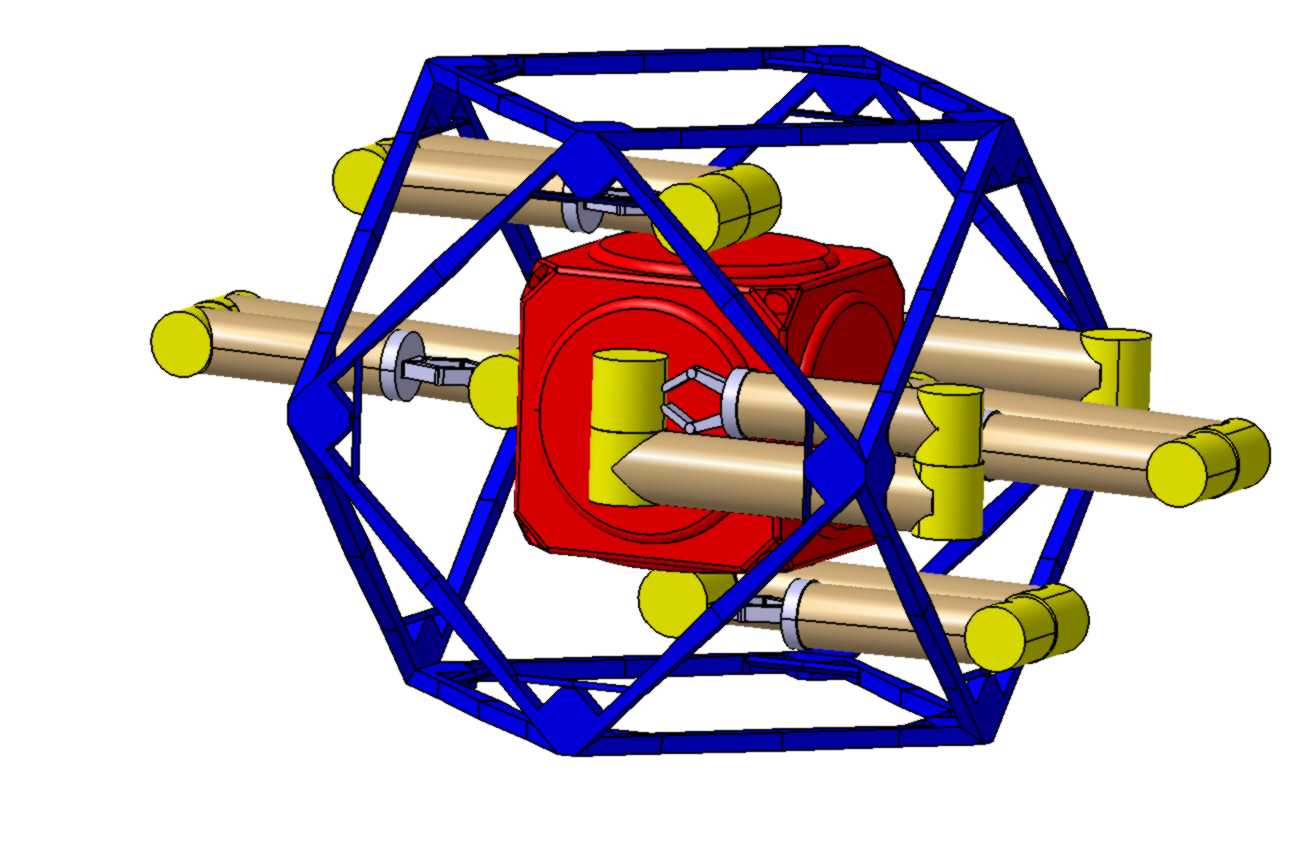
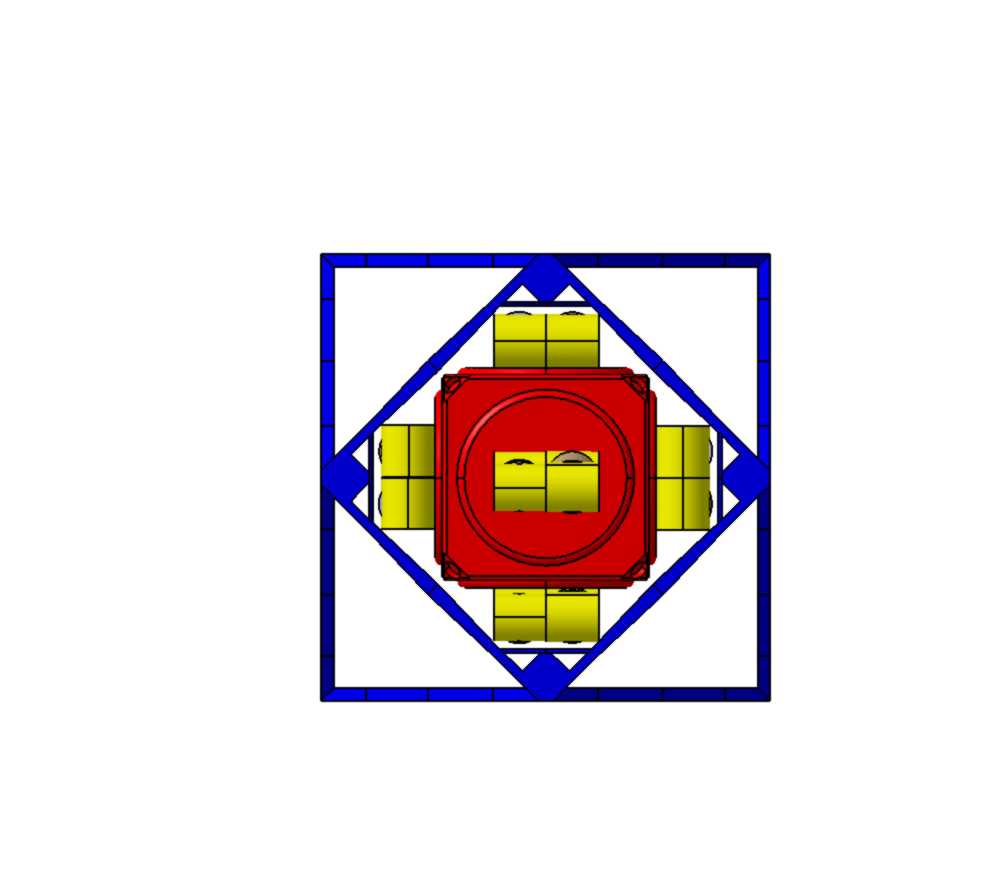
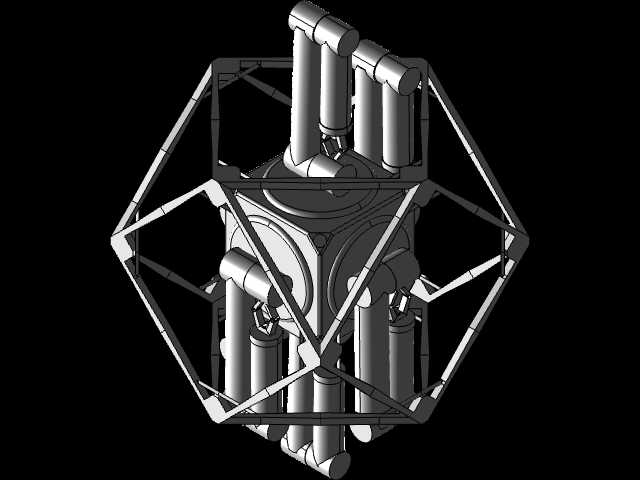
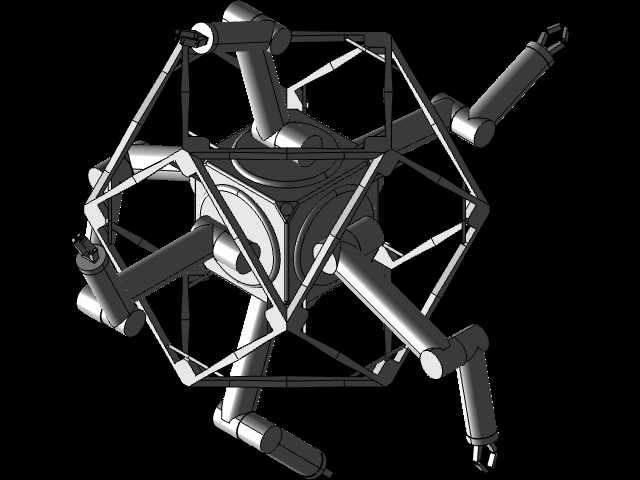
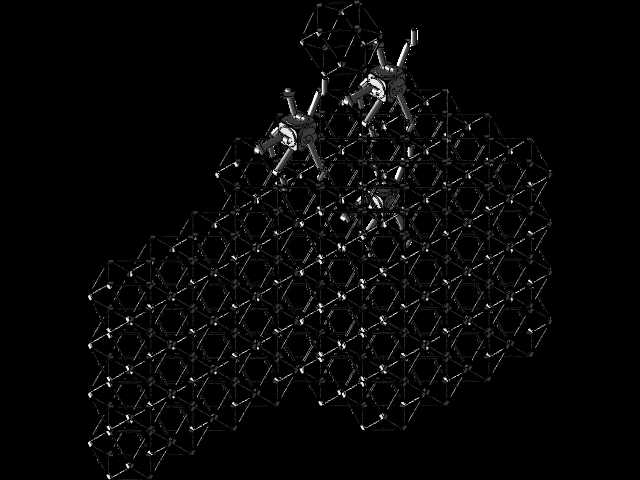
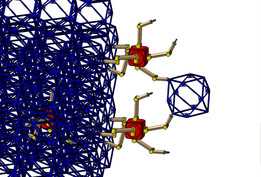
这个机器人的灵感来自于RNA的结构,它不仅构成了该结构的一部分,而且还发挥着复制该??结构的作用。借鉴这个概念,我设计了一个反映RNA结构的六面机器人。设计强调简单和高效,结合了我们在制作方面拥有丰富专业知识的机械臂。主要特点包括: - 轻量化、高机动性:确保机器人能够在太空环境中高效导航和操作。 - 团队合作能力:机器人被设计为协同工作,就像蚂蚁一样,提高了集体效率。 - 施工多功能性:机器人可以进入结构,将材料运输到相当高的高度,并在框架内安装管道和电线。这些特点使机器人能够高度适应太空任务中的各种任务,为模块化机器人施工技术的成功做出了贡献。
标签:
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Other,Rendering