未经测试-斯卡拉机器人手臂
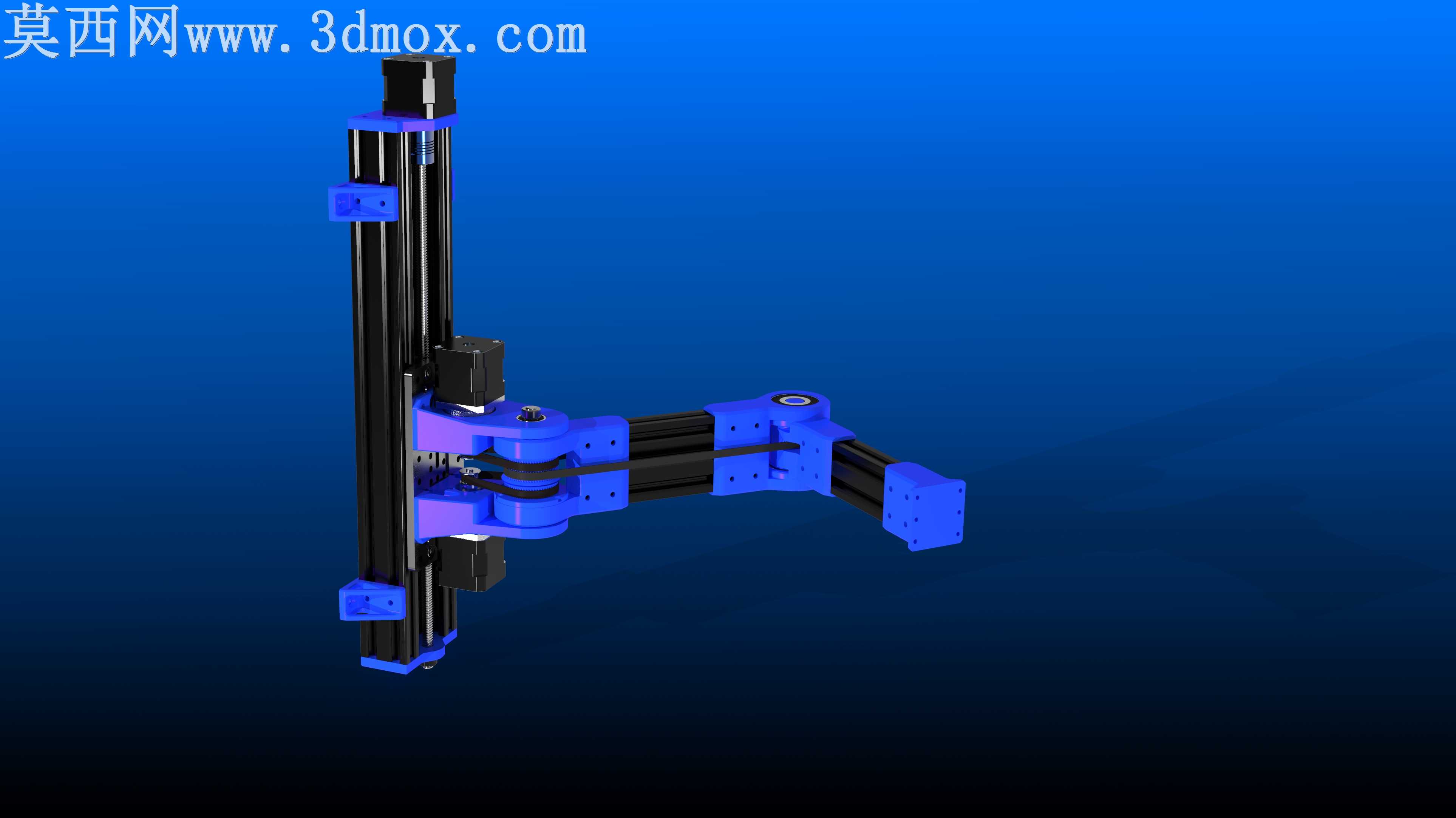
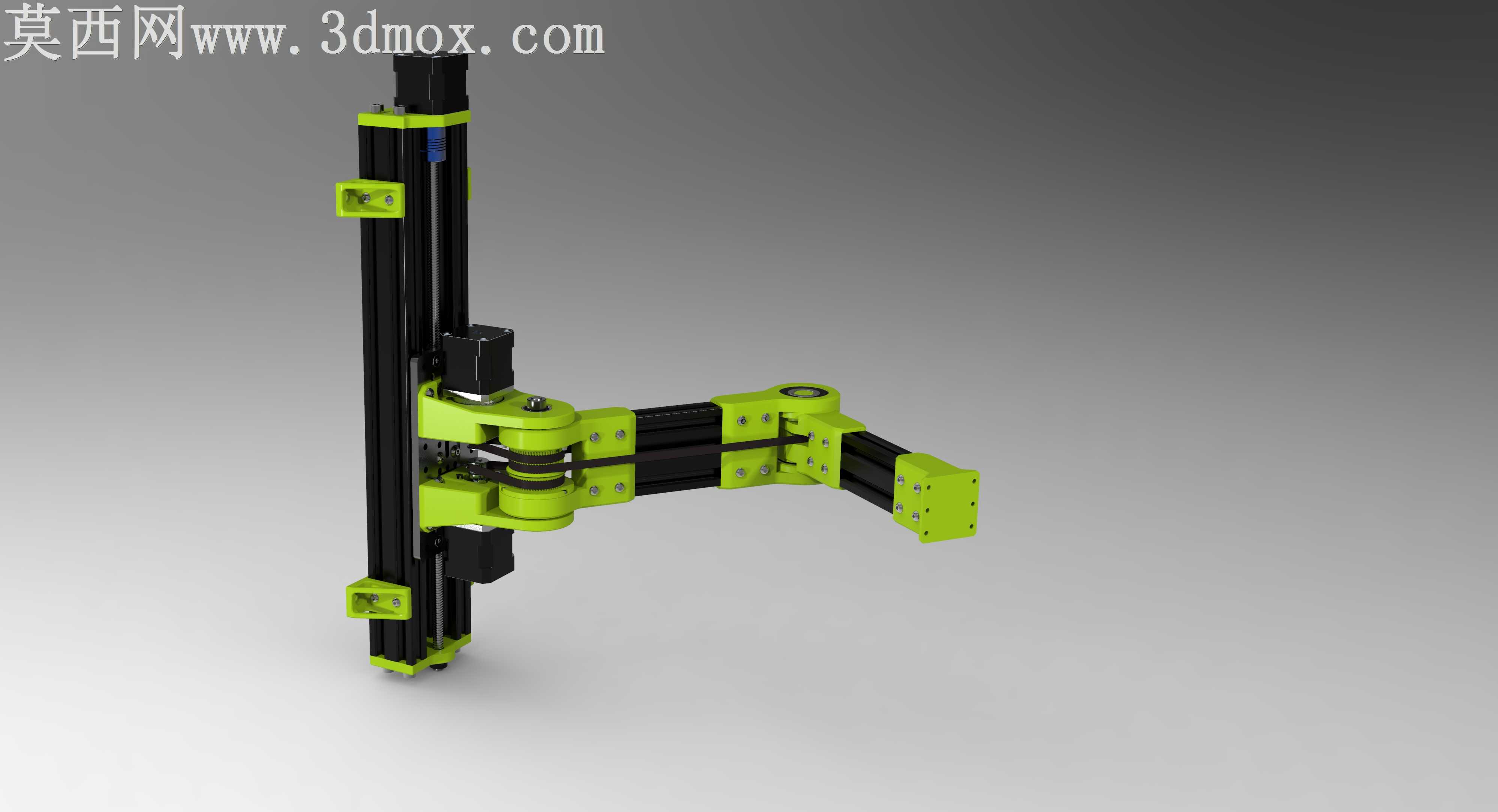
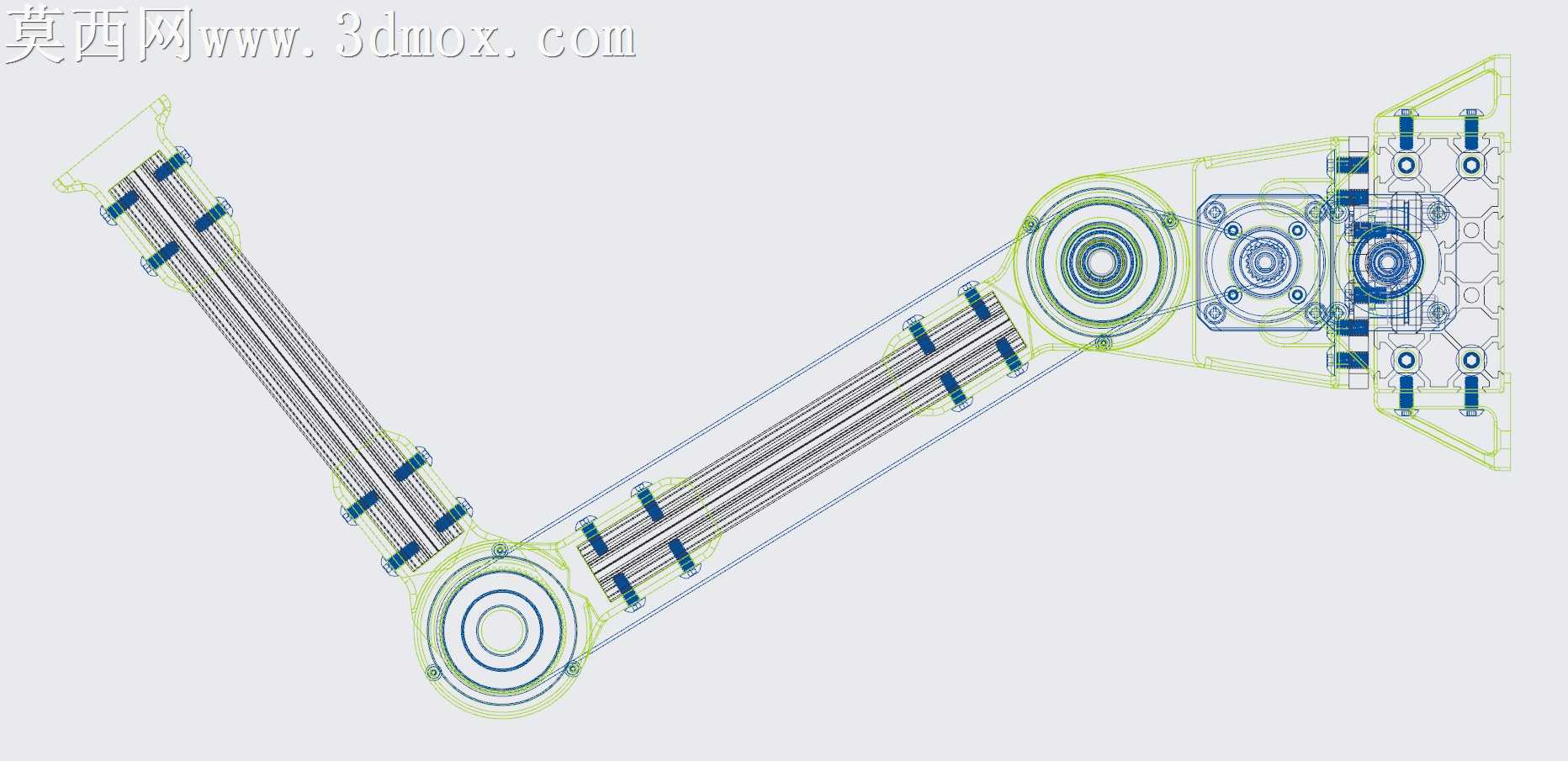
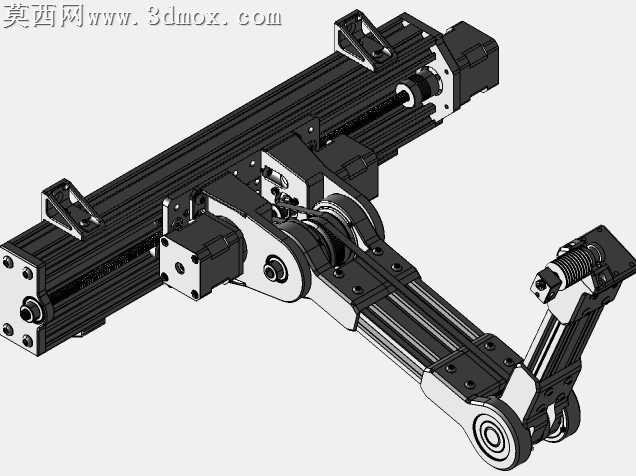
简单的SCARA机器人手臂由减速的NEMA 17步进电机驱动。在很大程度上依赖于OpenBuilds的挤压和V形槽材料轴。完全未经测试的、通用的基于Arduino的控制程序可能难以进行这种设计。两个手臂的马达都是静止在底座上的,这意味着第二个手臂相对于第一个手臂移动,而它的马达则不是。我的意思是:祝你好运
标签:


- 模型大小 :23.06 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering