

示例系统(3D 打印和视频)

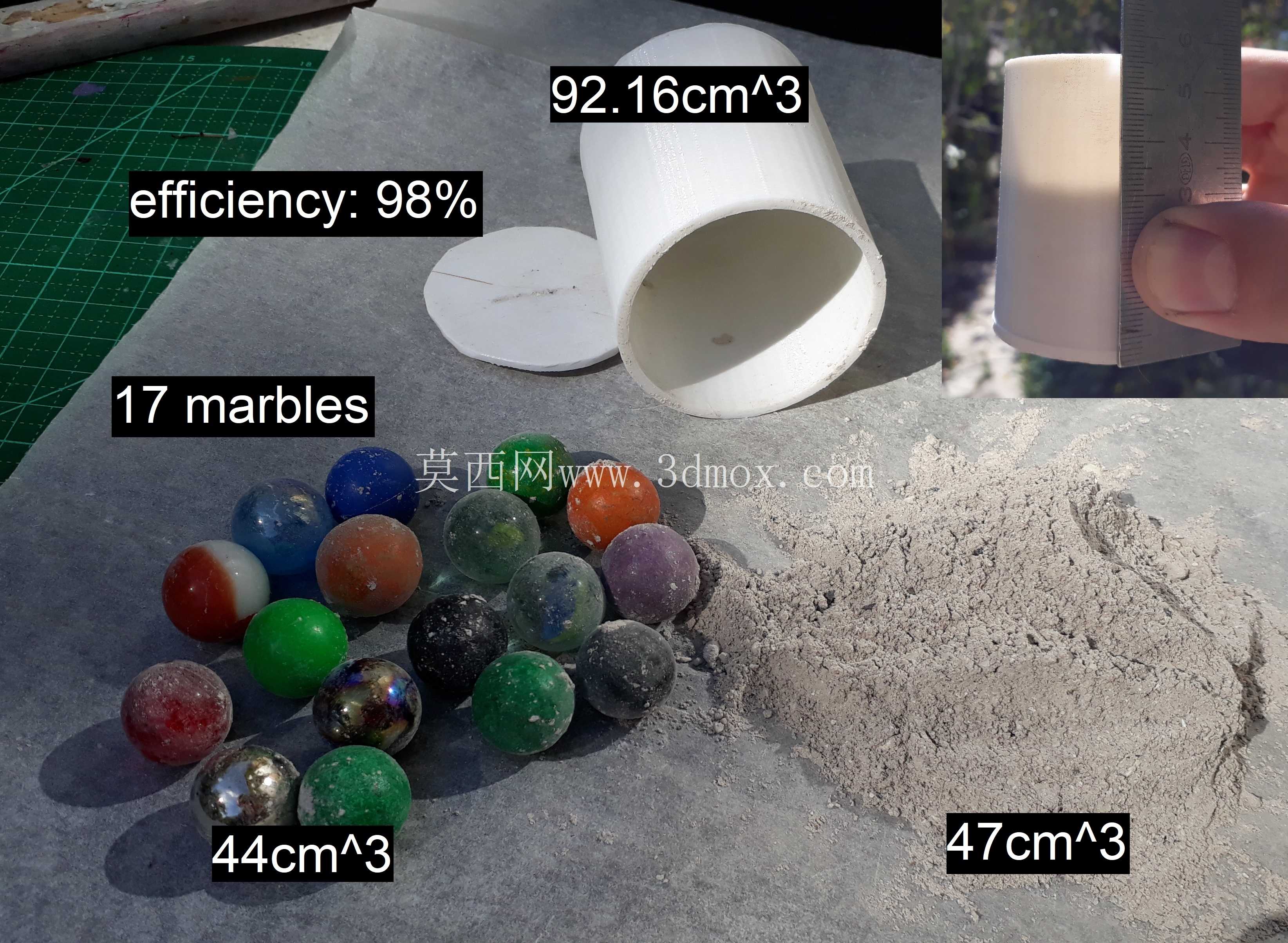

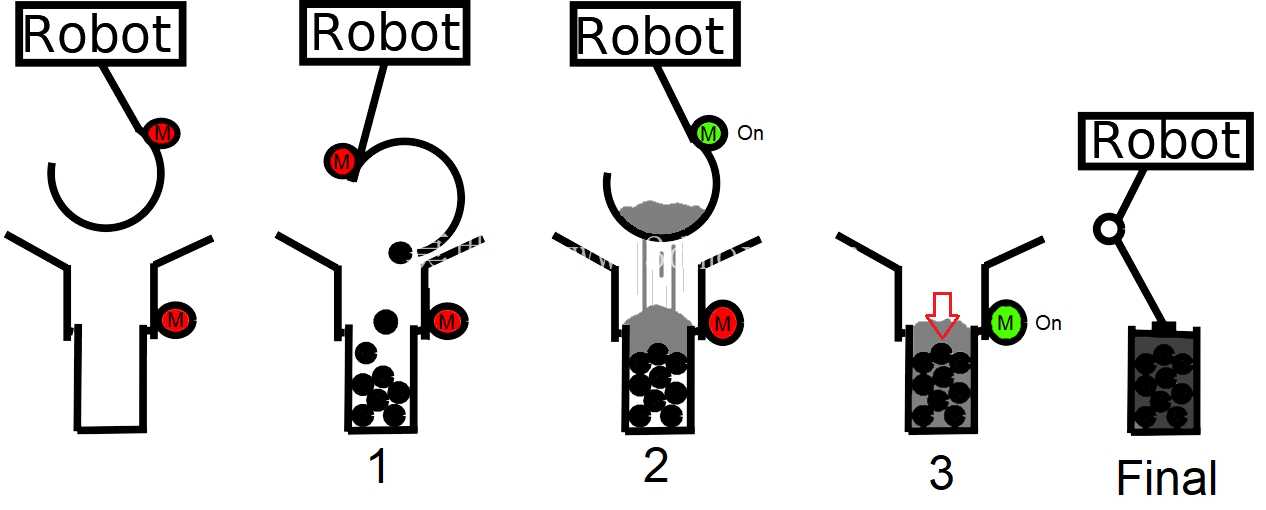
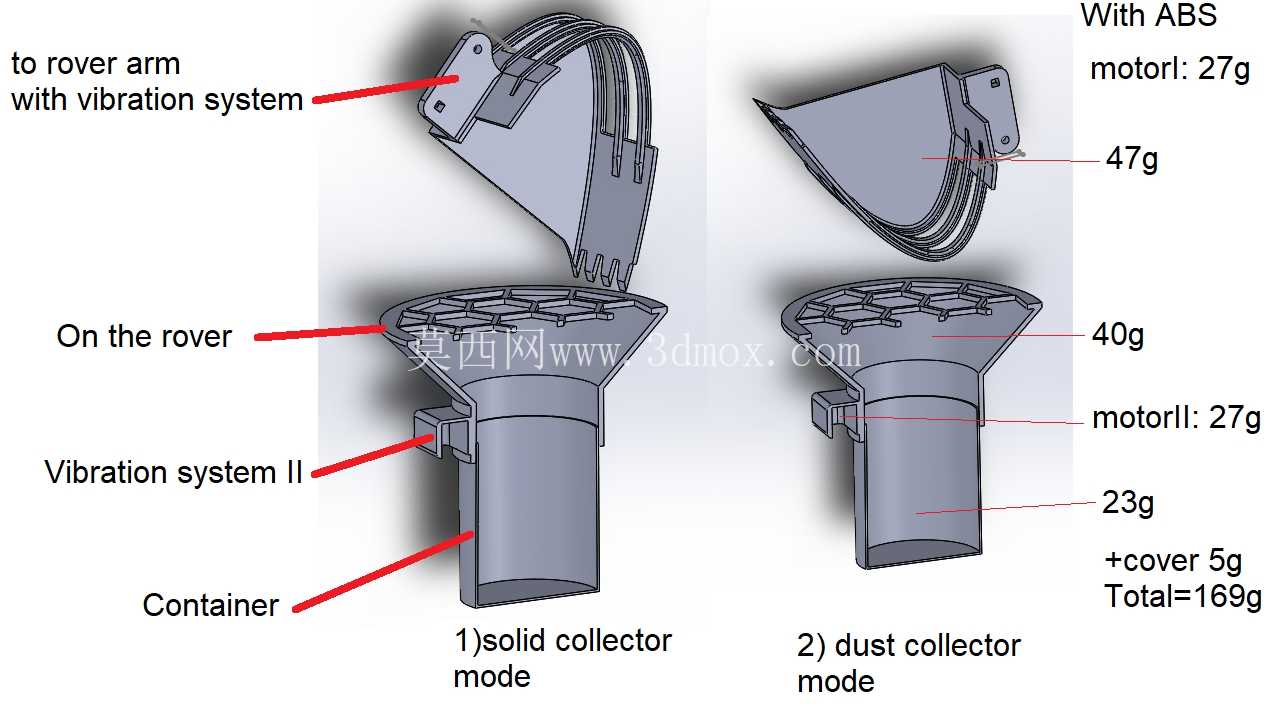
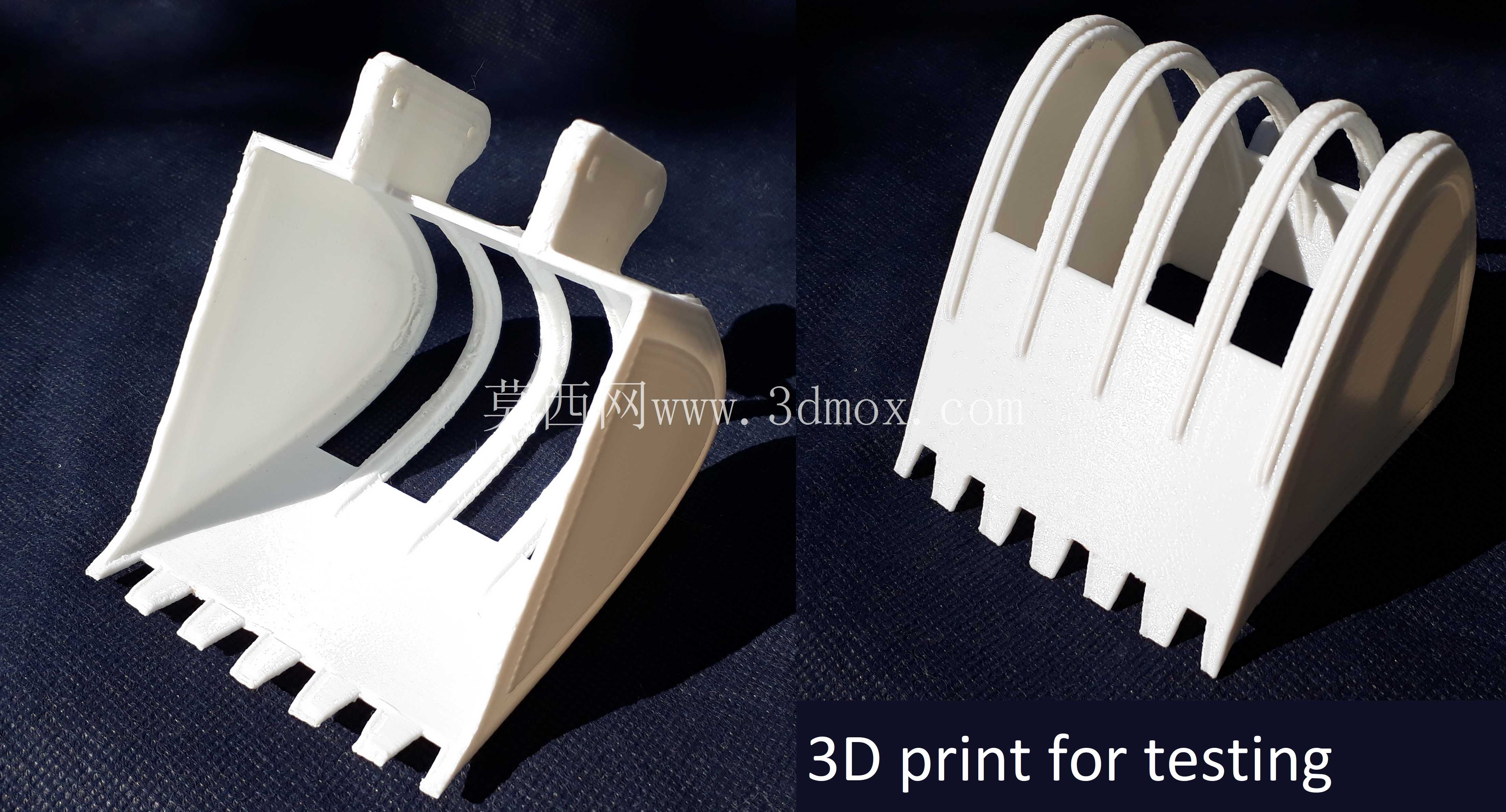
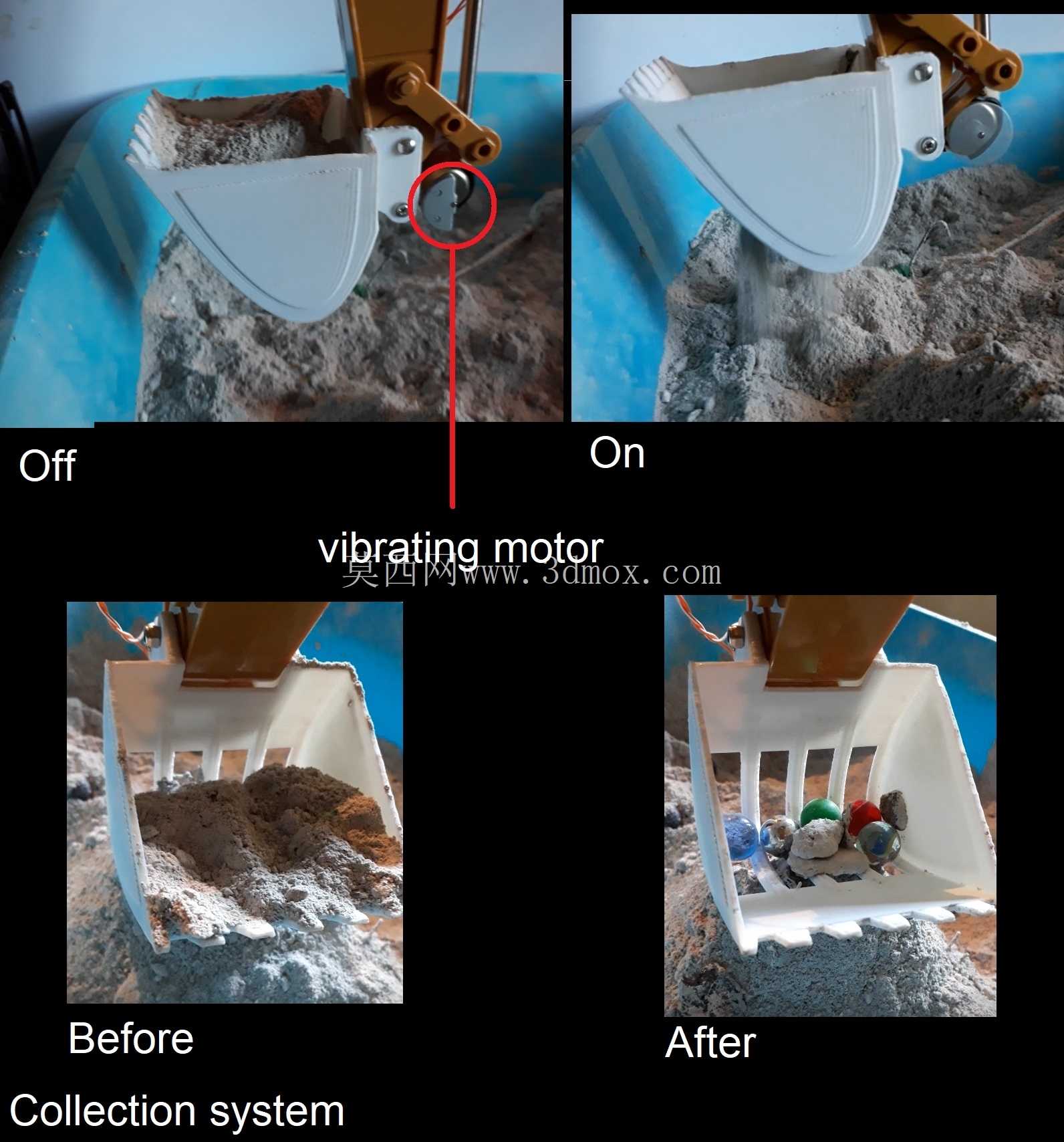
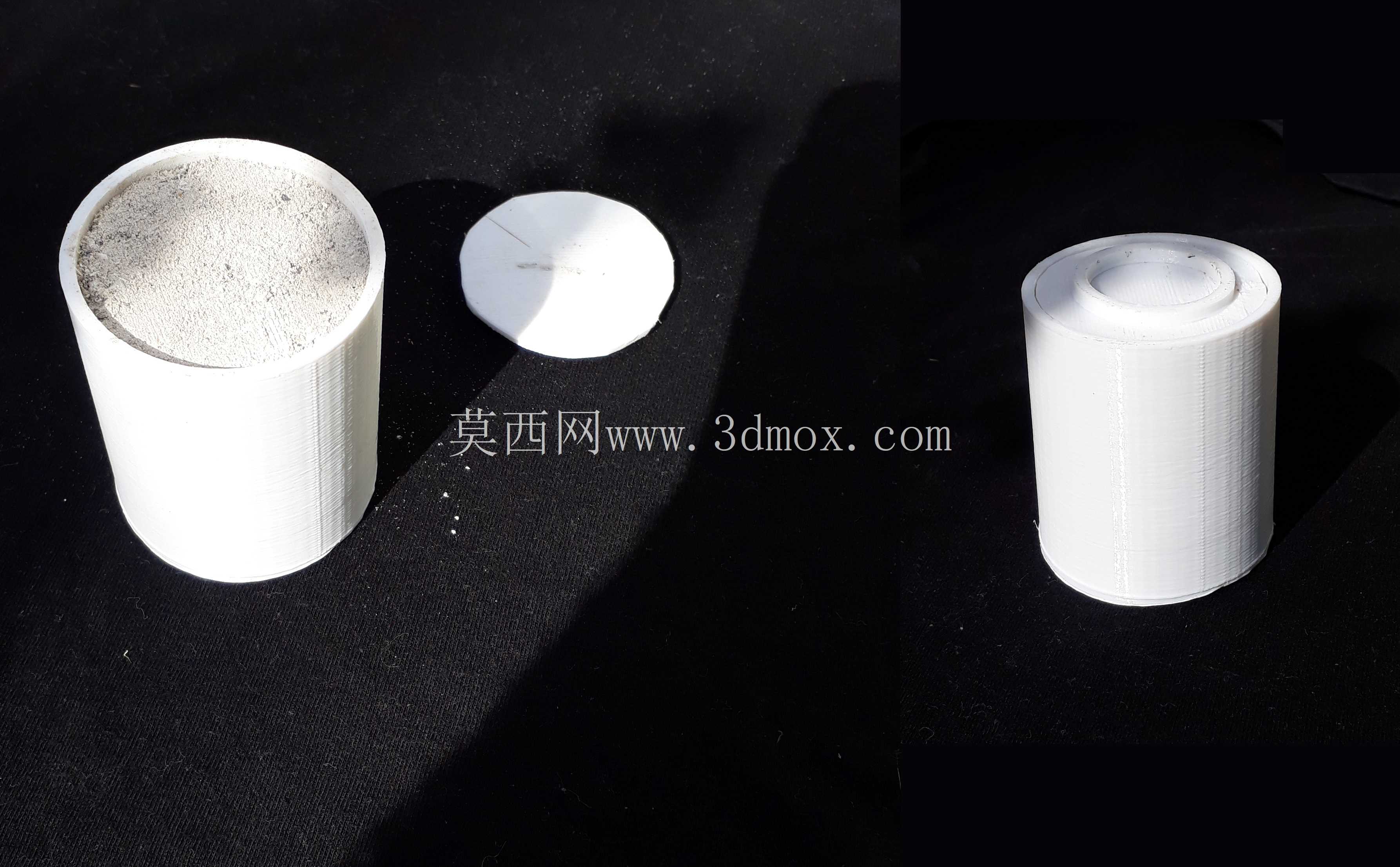
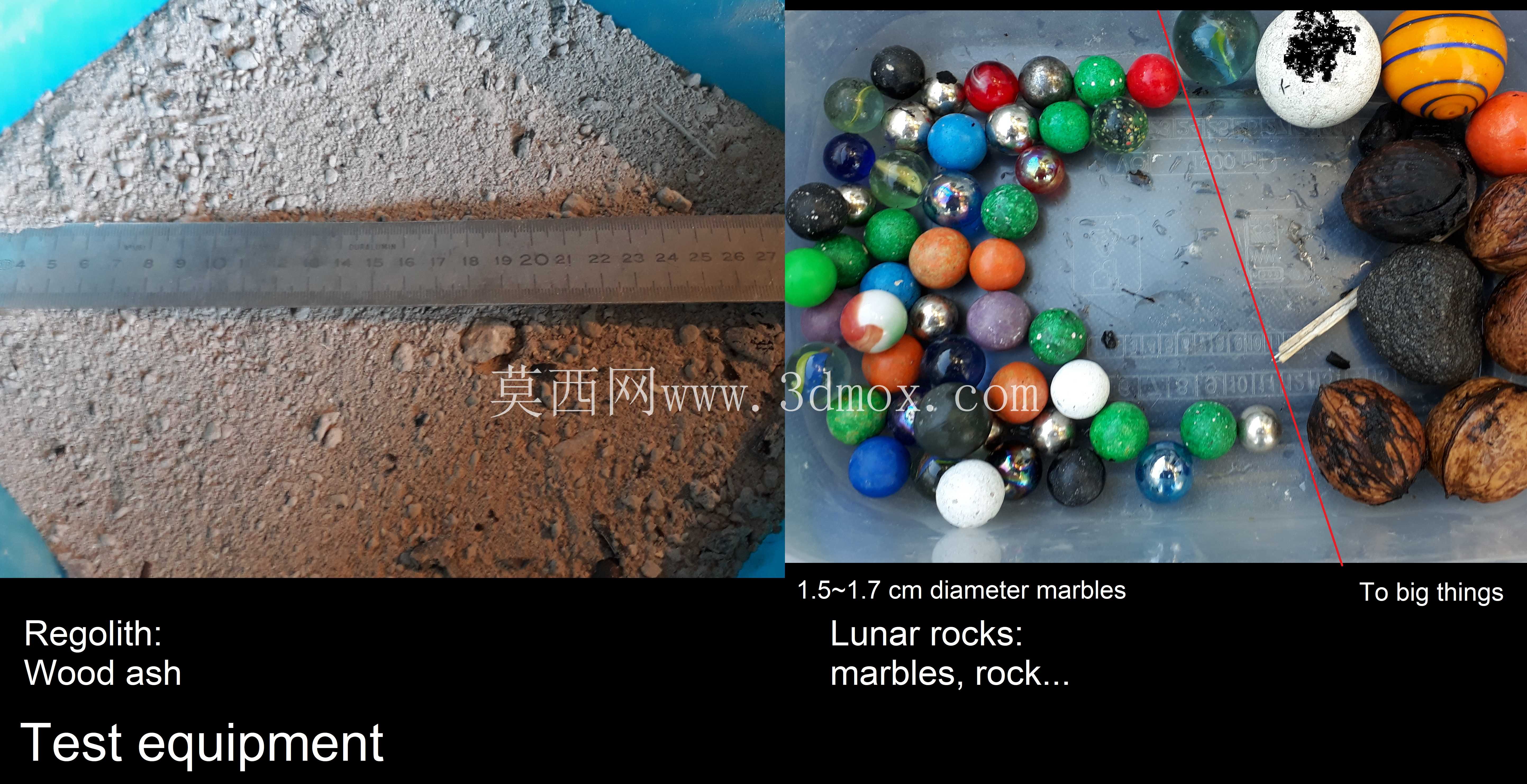

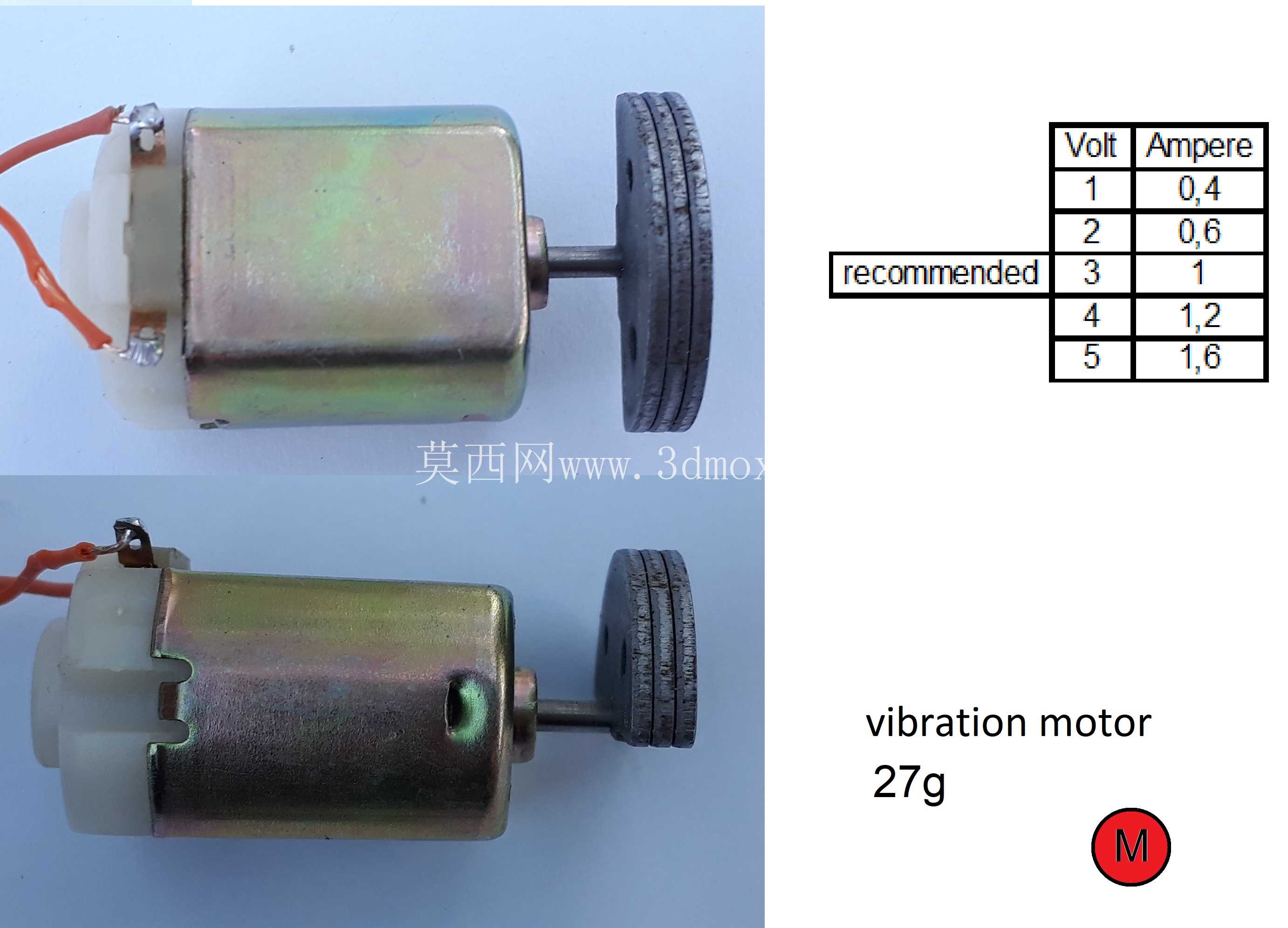

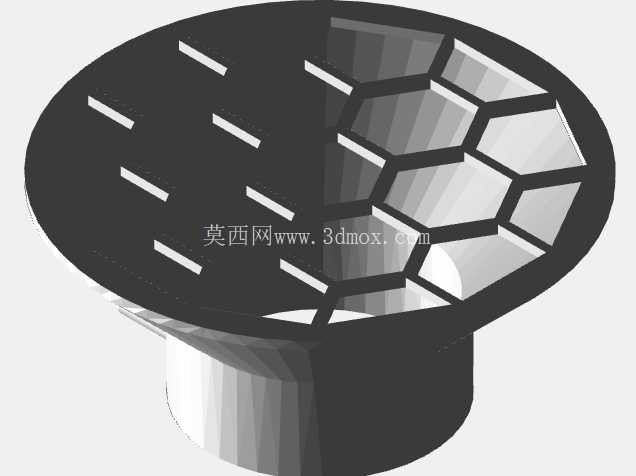
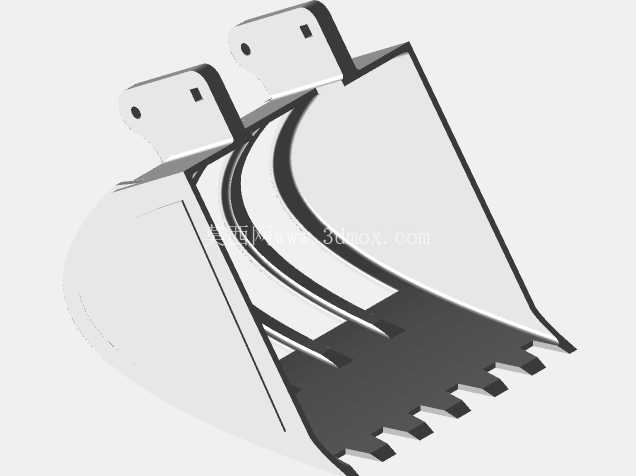
在这个项目中,我用一个旧玩具来制作机器人并测试我的解决方案。该系统基于两个振动电机。 一个用于排序,另一个用于组织样本。看第一个 PoC(组织)https://youtu.be/_ayKtOg9a0k 看第二个 PoC(排序)https://youtu.be/BDGcJdT-cKU 铲子可以让您选择石头或灰尘,并通过振动快速搜索地面。首先,我们放入石头,然后再次通过振动,用灰尘封闭石头之间的孔。通过该系统,容器用于 我们可以轻松地将摄像头安装在机械臂上,一步步看到铲子中的样品。对于 3D 打印,我使用 PLA,它的统计数据在 100C° 时熔化,但我不知道负温度耐受性。容器可以满足 4.8 厘米宽(直径)和 5.73 厘米高的要求。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Other,Rendering,STL


















