���Ტ����е��
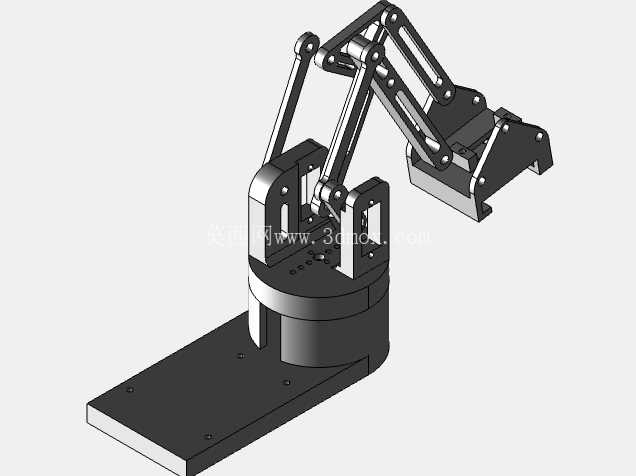
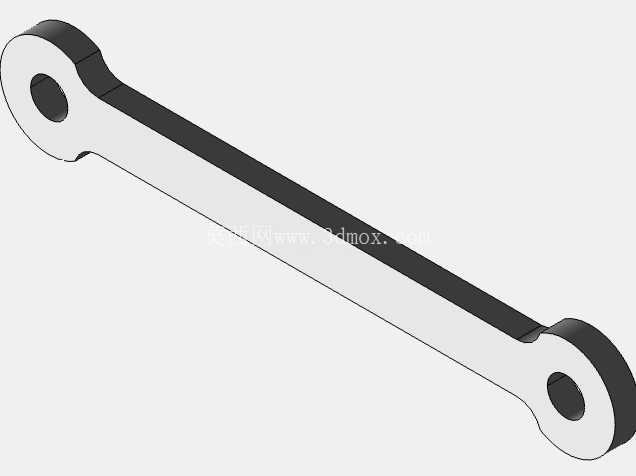
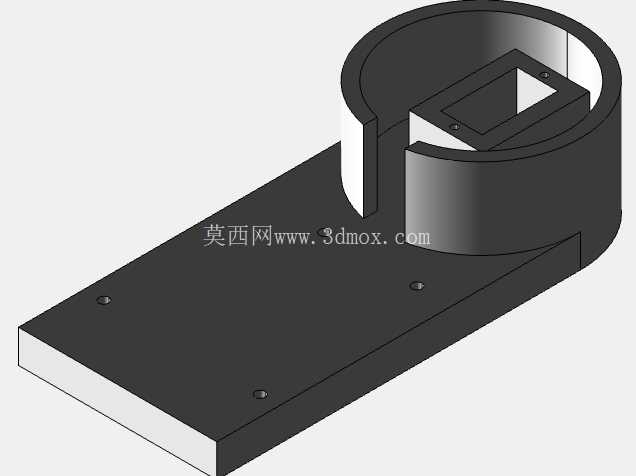
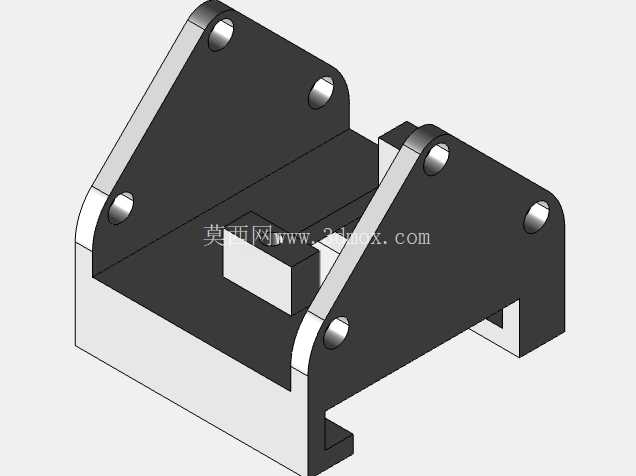
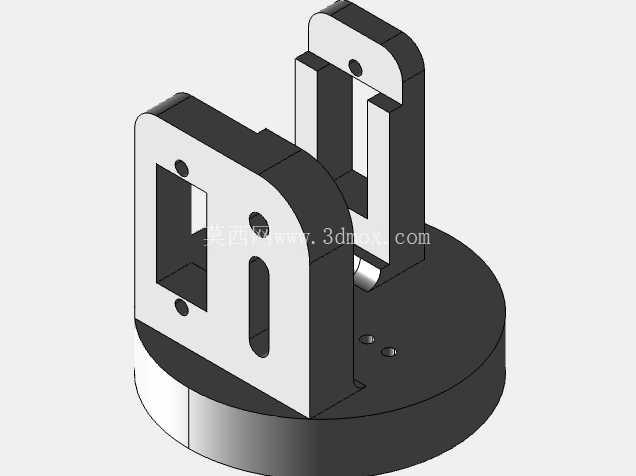
��� 4 ��������ֱ��������ŷ�ϵͳ������ SG90��������ʹ�� M5 �ݶ���װ��ԭ�͡� ���������ҵ�һ�γ��Կ�����е�ۣ���ǰ����ƿ��ܰ�����е��ṹȱ�ݡ��ҷ�����Щ�ļ���Ϊ�˸�����Ȥ�������ƻ��Ƶ��������ṩ�ο��� ��Ȼ��Щ�ļ��������ĺʹ�ӡ�����Ҳ�������δ���������͵����������ֱ�� 3D ��ӡ���ǡ� ��ע�⣬��ģ�ͽ�����Ʋο����û������ġ�������SG90�ȤΥޥ��������`�ܥ�`������������4����ܥåȥ�����������ץ��ȥ����ף��Ǥ��� ������Ƥ���ӹ̶��ˤ�M5�ͥ���ʹ�ä��Ƥ��ޤ������ܥåȥ��`��������Ͻ�ؤ�����ƤǤ��뤿�ᡢ�����Ϥ�Ƿꈤ����ޤ�Ƥ� ������Ԥ�����ޤ���ͬ���Υ��ܥåȥ��`�����������뷽���βο����ϤȤʤ뤳�Ȥ�Ŀ�ĤȤ��ơ�������������������ޤ��� fu��������Ĥ��Ƴ������뤳�ȤϿ��ܤǤ�������ƤΗ��֤��� ���ʤ��Ǥ��Τޤ������뤳�Ȥ��ƊX�������ޤ���fi������� �������ޤǥǥ�����βο�������ӥ�`���`�����ˤ���Ĥ�ǰ ��Ȥ����ץ��ȥ����פǤ��뤳�Ȥ�֪��������������
��ǩ��
------�ָ���----------------------------
- ��һƪ�������� 4mm ��� 12mm ���Ǹ˸�������
- ��һƪ�����γ��ֵ��

˵��ʲô��
- ȫ�����ۣ�0��

��û�����ۣ�������ɳ���ɣ�
- ģ�ʹ�С ��δ֪
- �� �� ��5Ī����
- ���ش��� ��
- �����ļ� ��STEP / IGES