

罗斯骑士
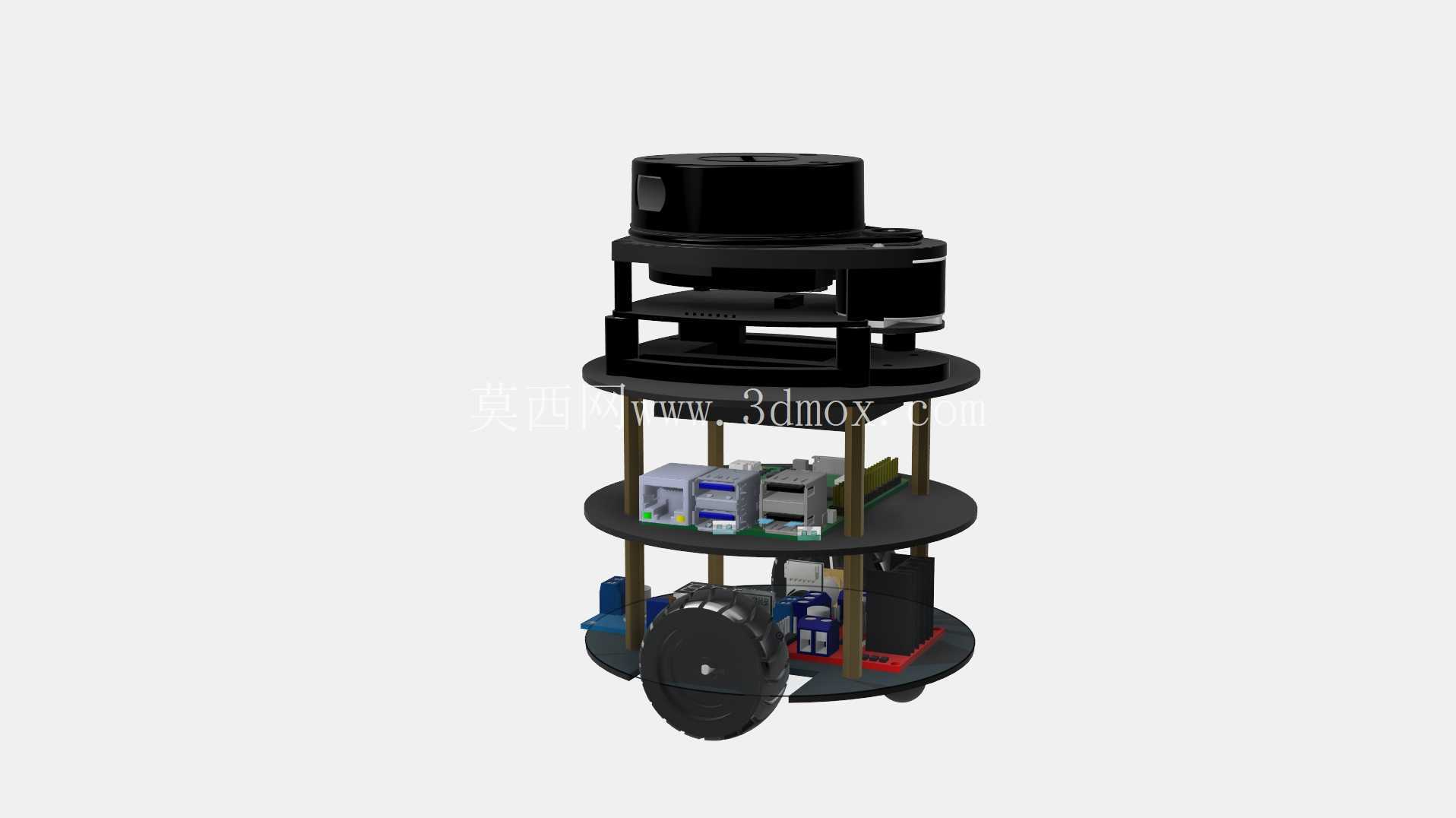
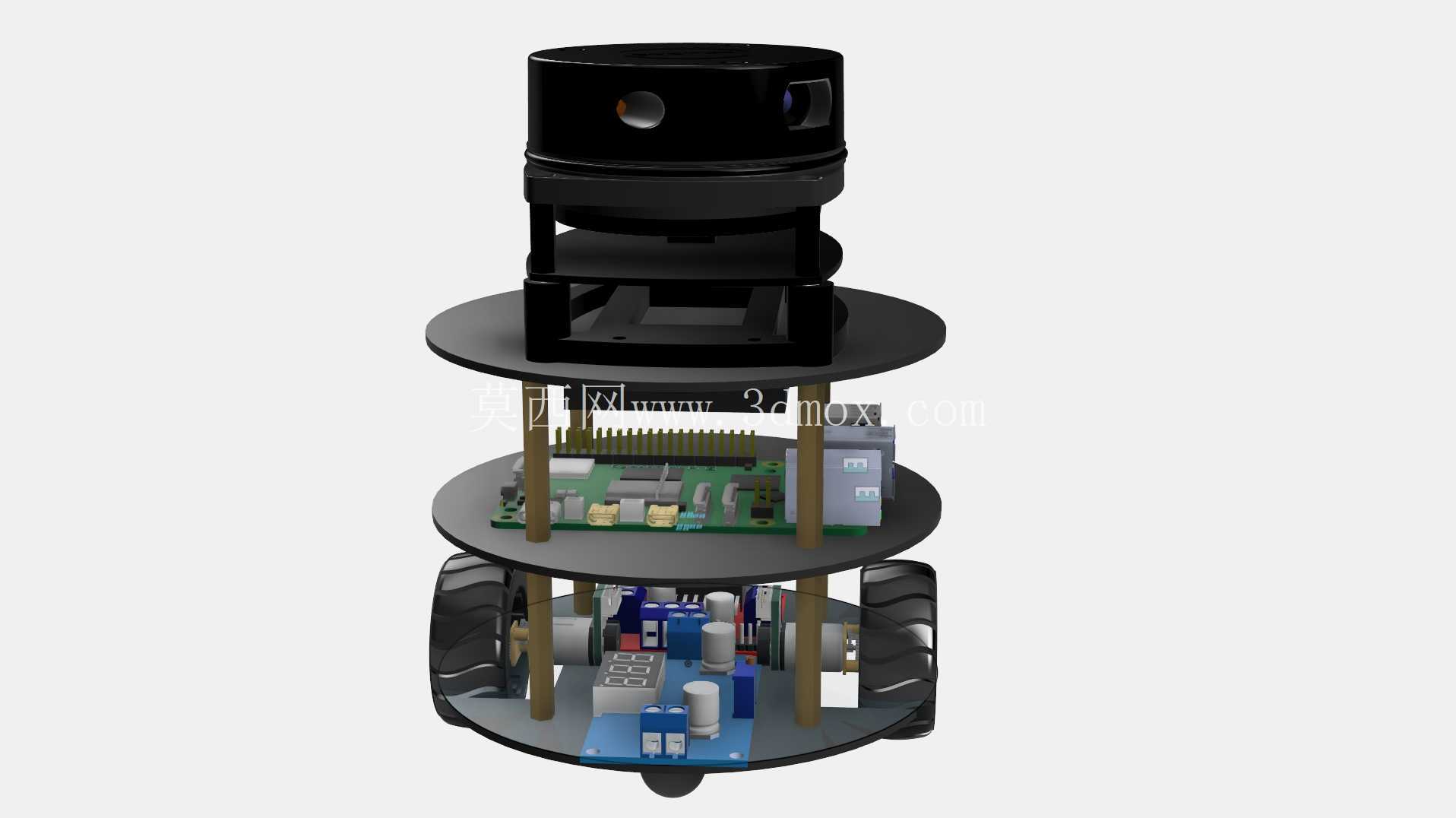
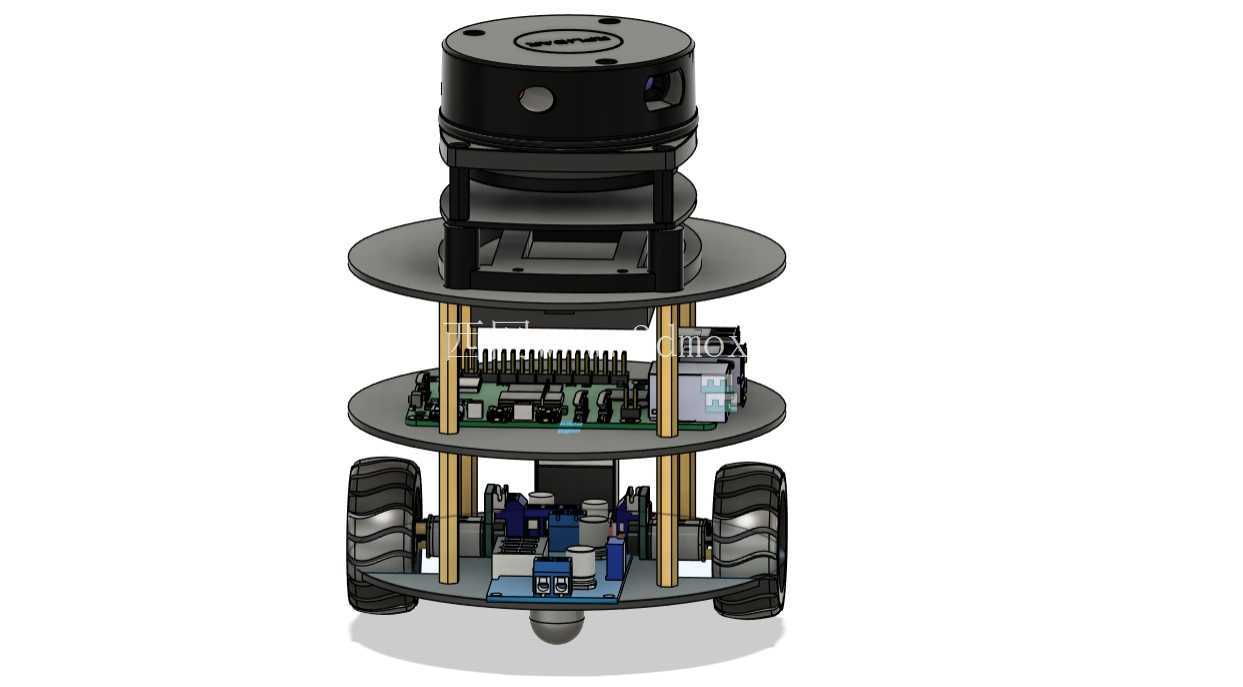

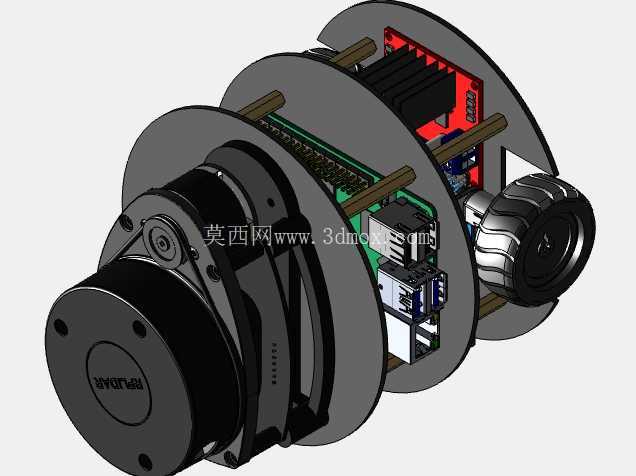



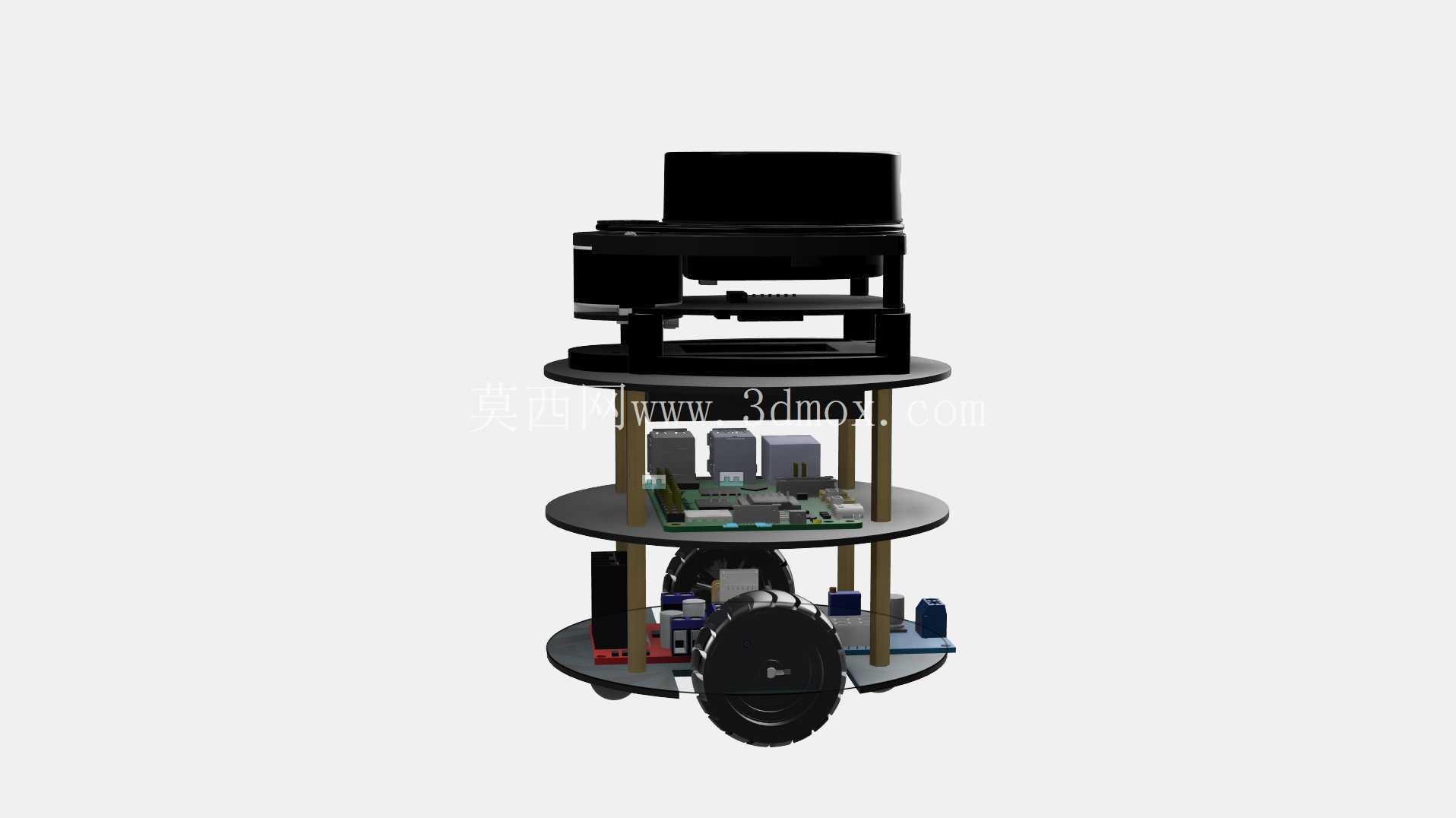

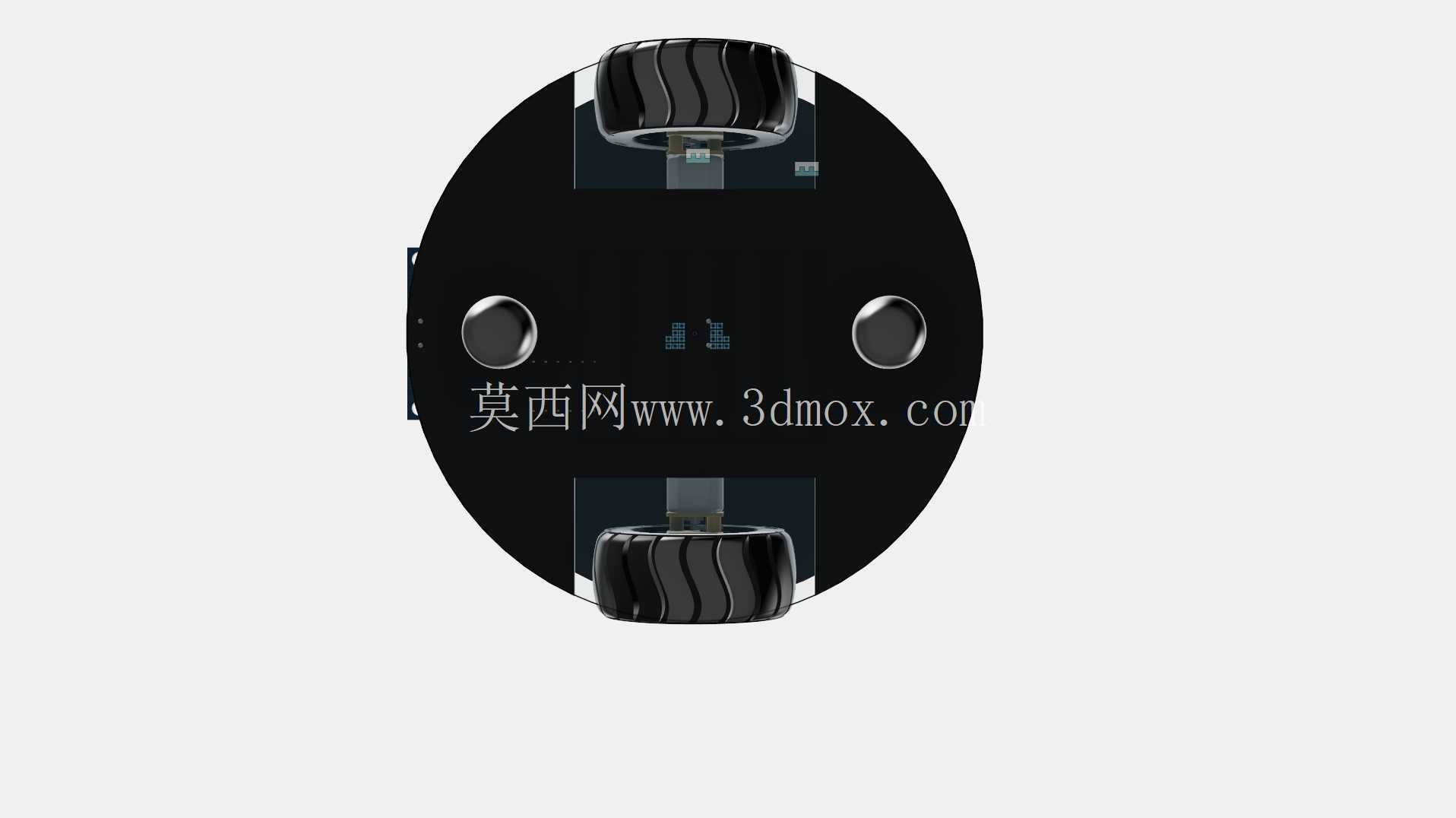

A compact autonomous mobile robot platform designed for ROS2-based research and development. 该机器人具有多层圆形底盘,顶层安装有 LiDAR 传感器、Raspberry Pi 计算单元、差动驱动系统、电机驱动器集成以及用于附加传感器和嵌入式电子设备的空间。该机器人的设计灵感来自现代自主移动机器人和 TurtleBot 式研究平台,使其适用于 SLAM、自主导航、避障、AI 机器人和教育机器人应用。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES,Fusion 360


















