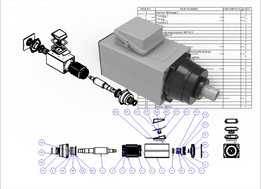
实验室上肢假手 - 基于 ESP32(6 DOF)



















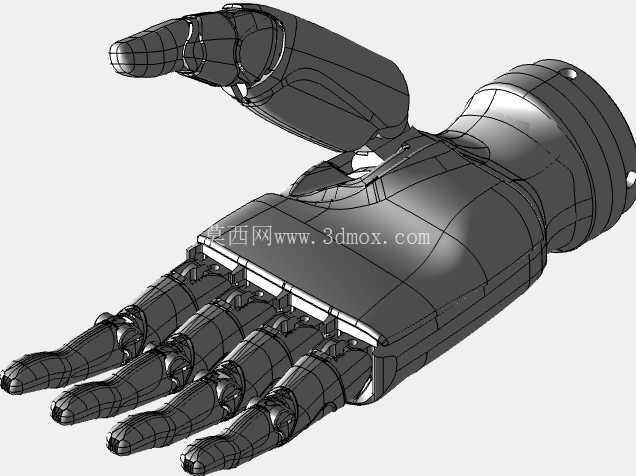













该项目展示了上肢假手的实验室原型,设计用于混合肌电和语音控制系统的研究和实验验证。机械结构https://youtube.com/shorts/g_7zg6QrxNI?feature=share6 自由度单独驱动的手指(伺服驱动)用于迭代开发的模块化机械设计带有内部电池仓的集成前臂外壳电子与控制系统微控制器:ESP32 带扩展板伺服电机由专用内部电池组供电伺服电池系统的主电源开关用于控制器电源输入的外部 DC 5.5 mm 插孔用于 ESP32 编程和固件更新的 USB Type-C 端口内部接线架构针对模块化服务进行了优化电池和充电内部可充电电池系统通过外部 USB 端口充电用于控制电子设备和伺服驱动的独立电源管理人机界面通过 Myo Armband 进行控制(通过 BLE 基于 EMG 输入)集成语音控制模块(混合) 命令系统)Nextion 2.5”触摸屏显示器模式选择实时系统可视化状态监控显示可通过USB接口编程感觉反馈手指中的集成压力传感器振动触觉反馈模块(振动电机)用于系统状态和交互反馈的LED指示器目的该原型用于:混合肌电和语音控制假肢研究肌电信号采集和手势分类感觉功能
edback 实验辅助机器人的嵌入式系统开发该模型共享用于学术研究、原型设计。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,SOLIDWORKS,STL