机械骨干
该项目提出了一种模块化机械主干,由重复的椎骨状片段组成,旨在形成灵活但结构连贯的链条。 每个模块都集成了互锁功能和紧固件接口。 潜在的应用包括机器人脊柱、连续体或蛇形机器人、灵活的机械手、可穿戴或辅助设备、相机或传感器定位系统以及机械设计演示。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering

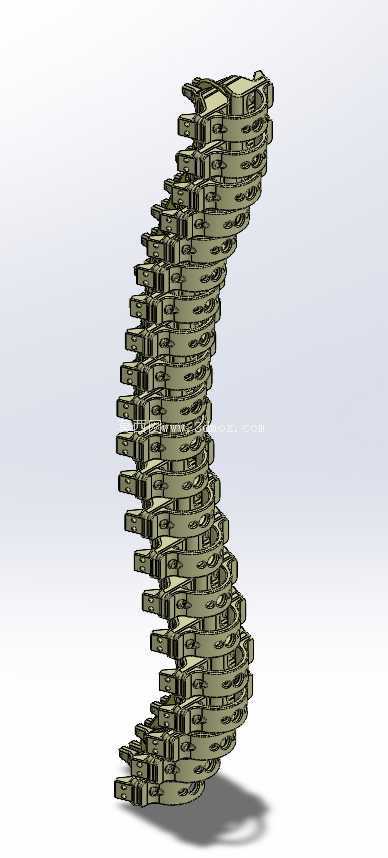
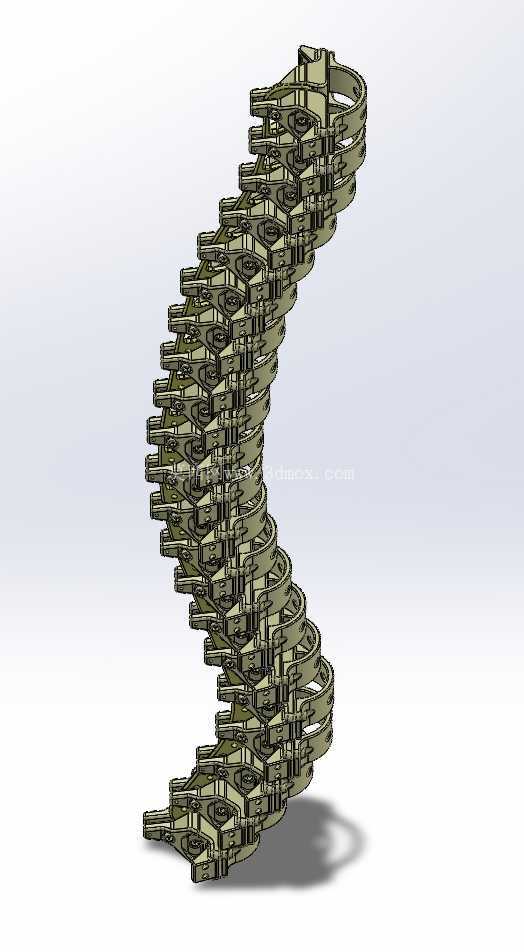

该项目提出了一种模块化机械主干,由重复的椎骨状片段组成,旨在形成灵活但结构连贯的链条。 每个模块都集成了互锁功能和紧固件接口。 潜在的应用包括机器人脊柱、连续体或蛇形机器人、灵活的机械手、可穿戴或辅助设备、相机或传感器定位系统以及机械设计演示。