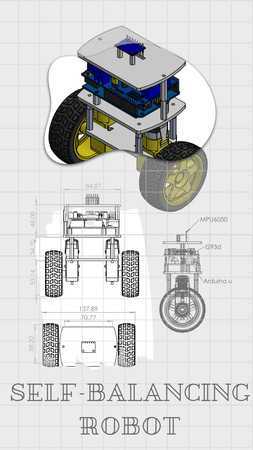
自平衡机器人
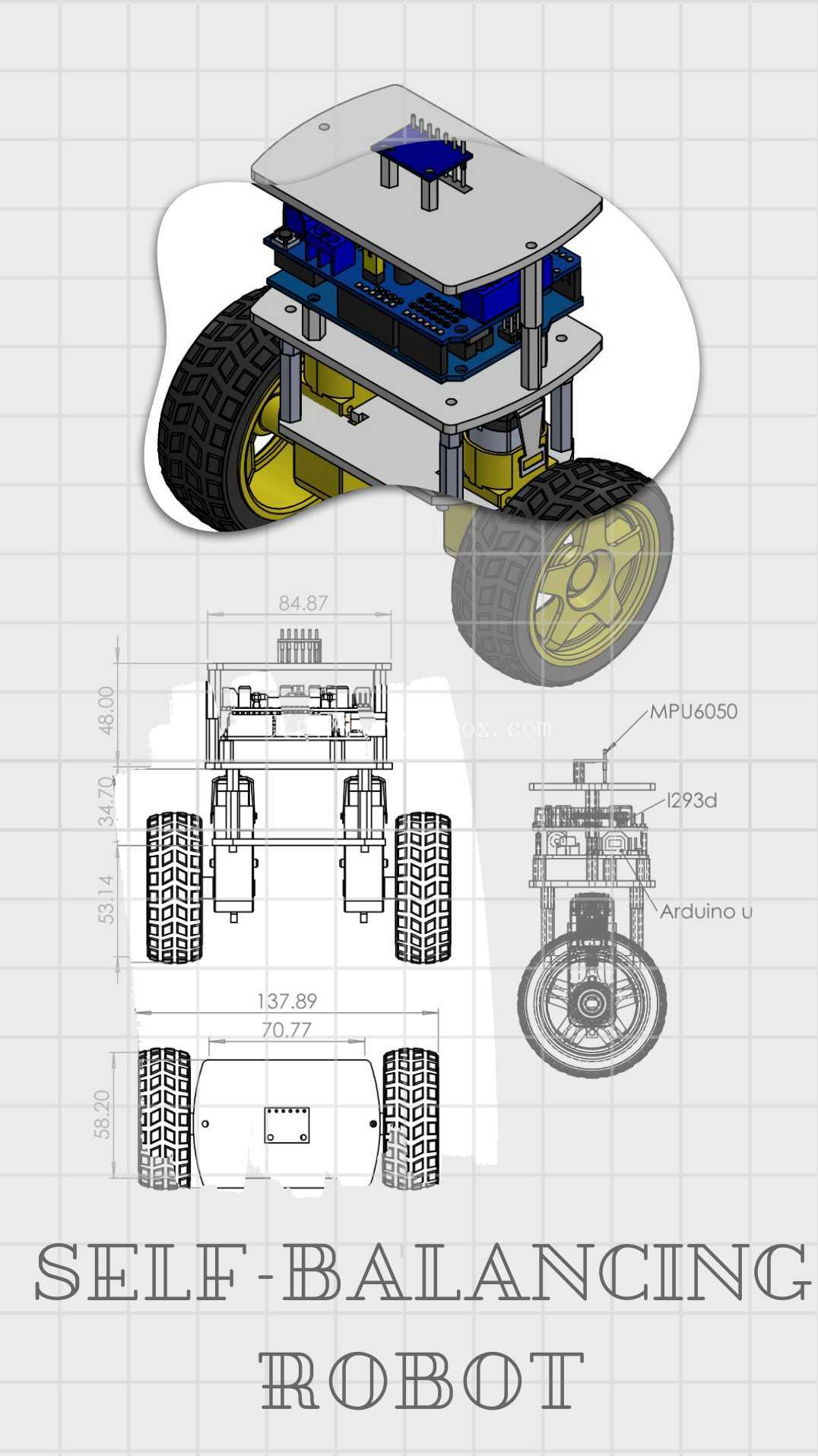

自平衡机器人是一种利用控制系统自动保持直立位置平衡的机器人。 该机器人通常配备陀螺仪和加速度计等传感器(例如MPU6050)来检测倾斜角度和加速度。 控制算法(例如 PID 控制器(比例、积分、微分))使用来自传感器的数据来调节电机的速度和方向,使机器人保持稳定。Karakteristik utama dari 自平衡机器人 meliputi:nSistem Dinamis: Robot harus terus-menerus melakukan koreksi untuk mengimbangi gravitasi.nAktuator Motor: Motor menggerakkan roda untuk menyesuaikan posisi robots.nAlgoritma Kendali: PID digunakan untuk menghitung koreksi berdasarkan sudut kemiringan dan kecepatannya.nRobot ini sering digunakan untuk mempelajari konsep robotsika, kontrol sistem, dan pemrosesan sinyal, serta diaplikasikan pada teknologi 现代 seperti 悬浮滑板 atau Segway。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering