机械手(机械臂)
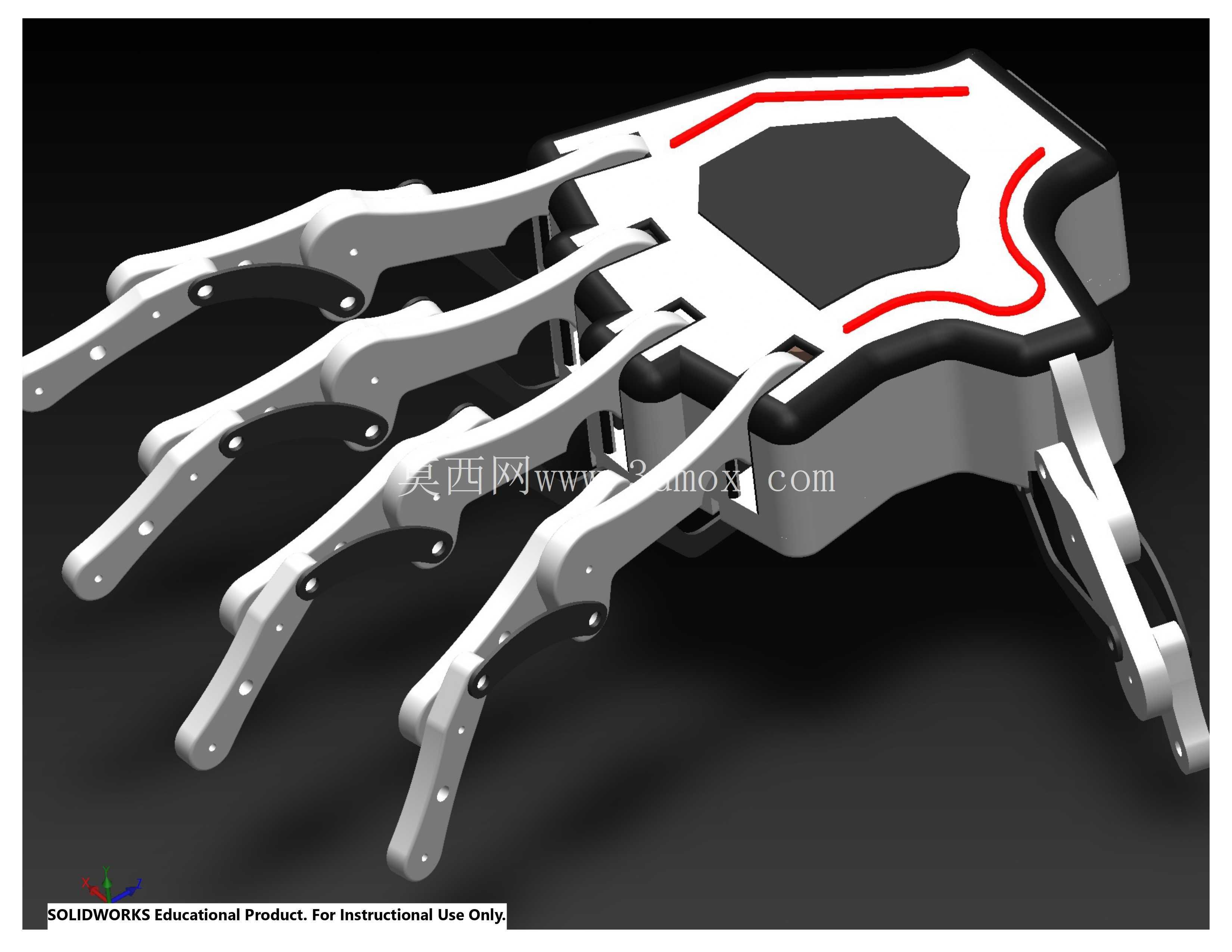
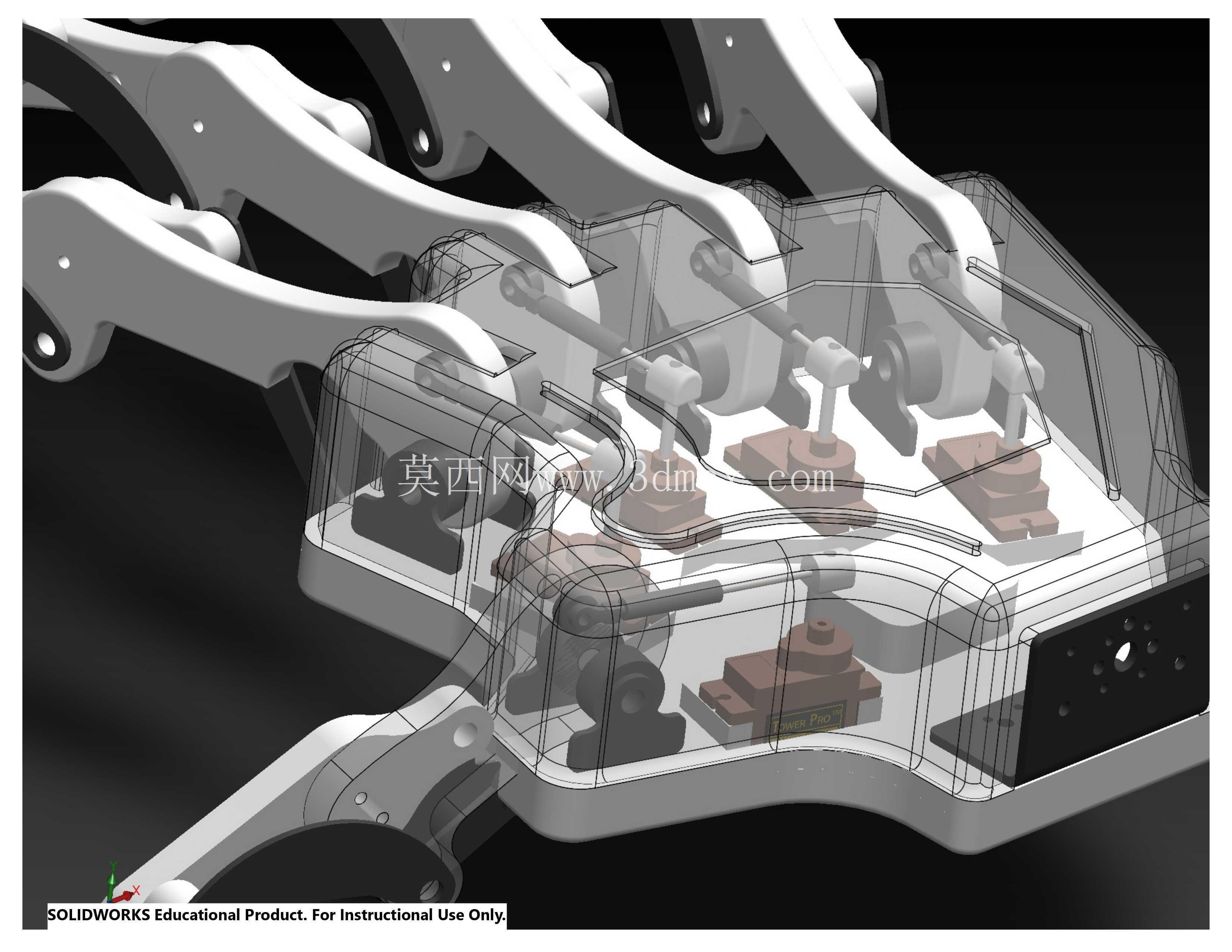
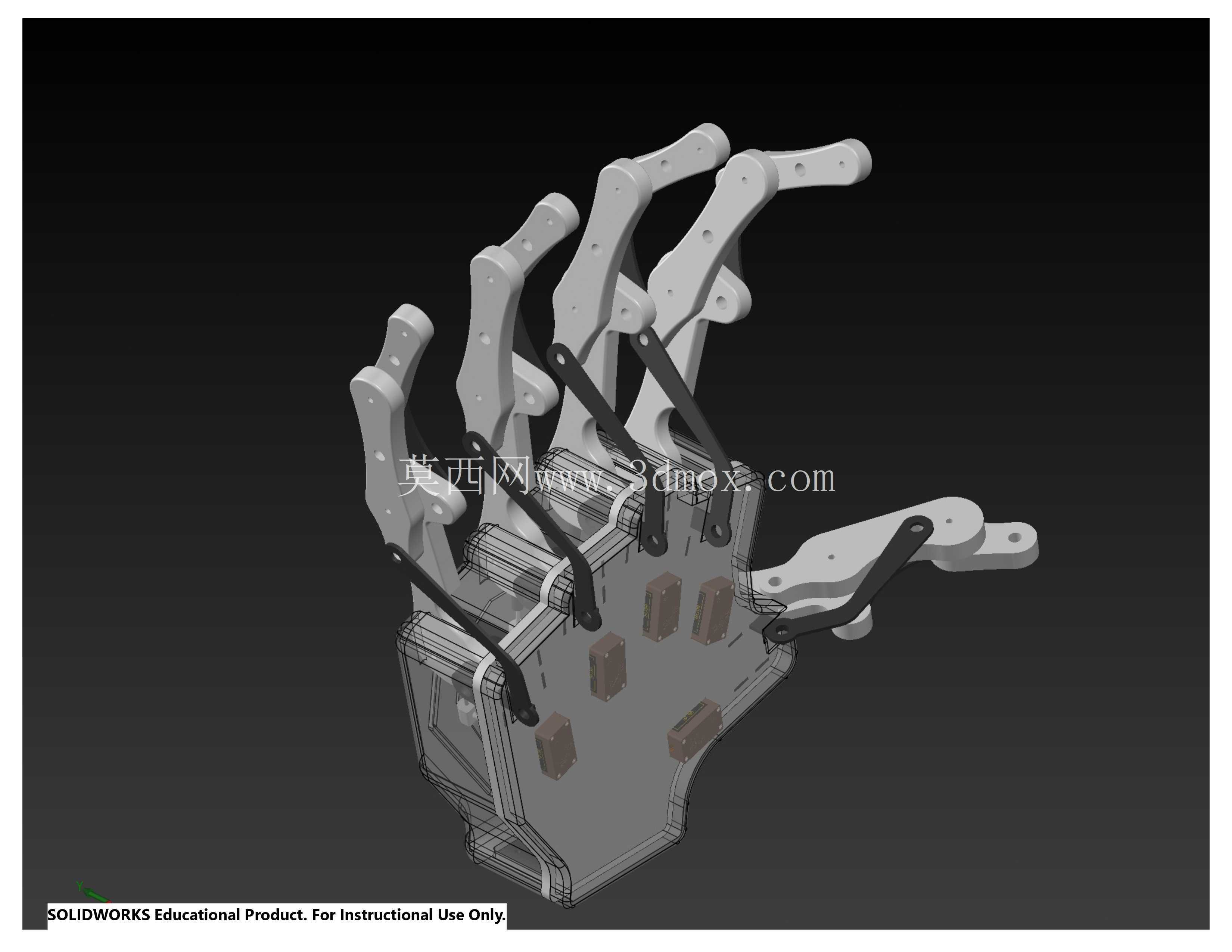
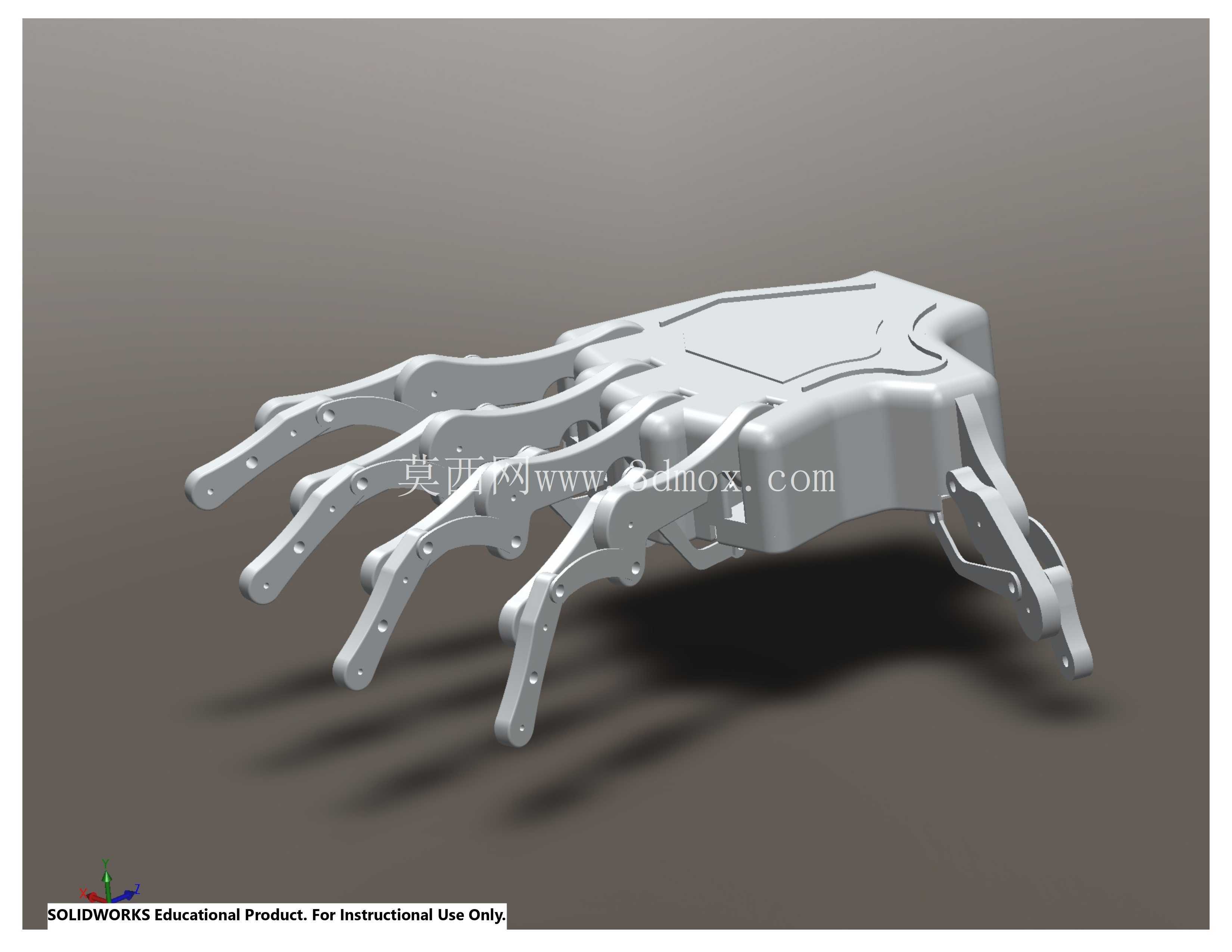
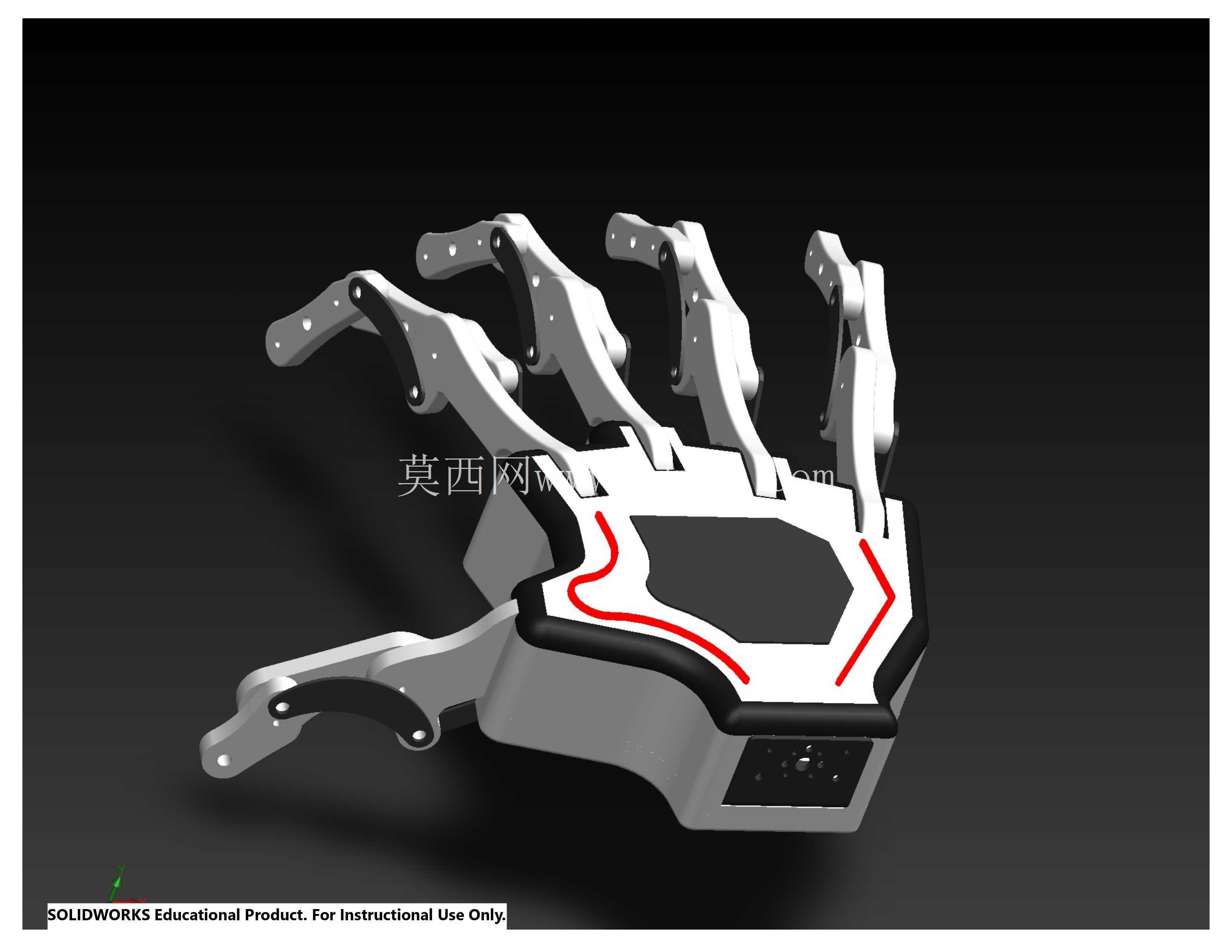


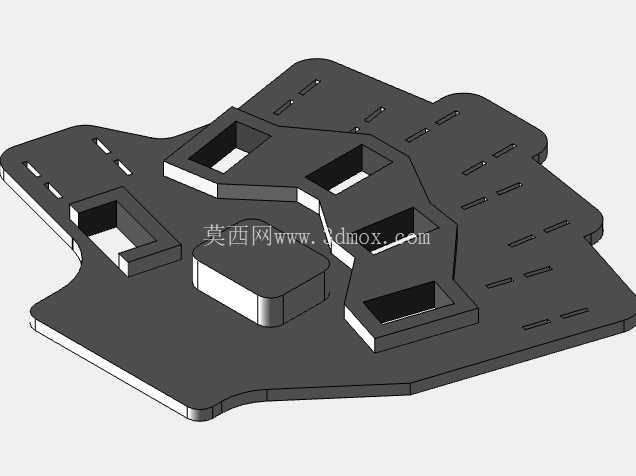




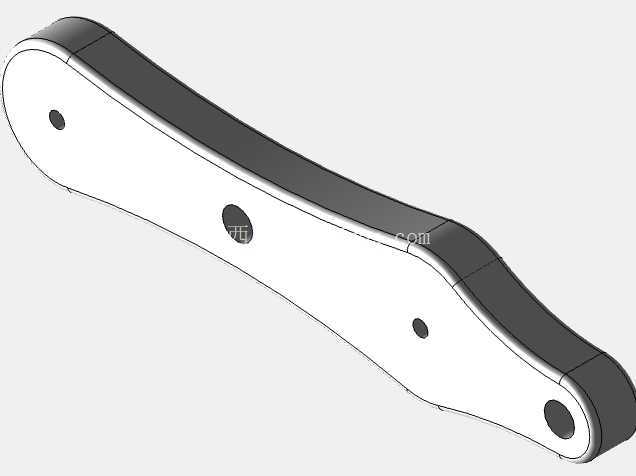
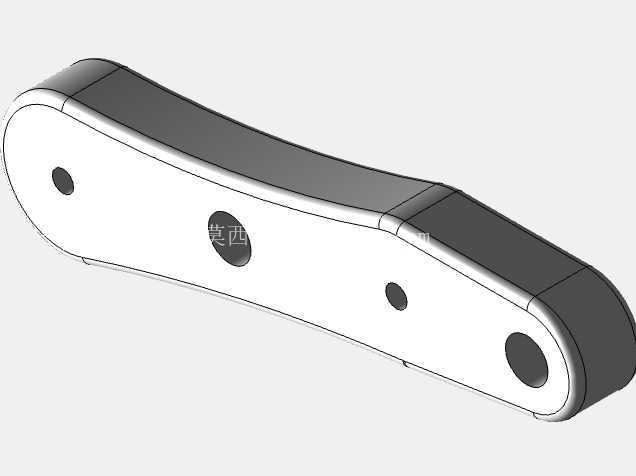


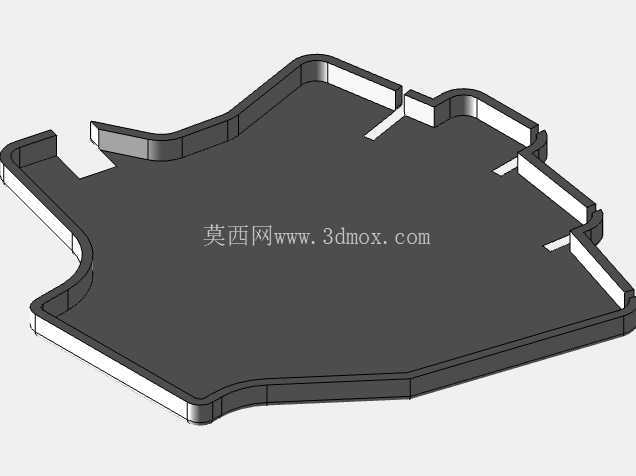






这是在 SolidWorks 中设计的可 3D 打印机器人手模型。 该组件具有紧凑的手掌外壳,其中包含五个 Tower Pro 微型伺服系统,可独立控制每个手指。 它还由 5 个气弹簧组成,可保持手指稳定并长时间保持位置。 主要特点:机械联动:每个手指都使用多关节联动系统,实现平稳、逼真的运动。集成电子设备:内部布局专门为 Tower Pro SG90(或类似)微型电机设计。模块化设计:手指和手掌是独立的组件,更容易打印和组装。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering