
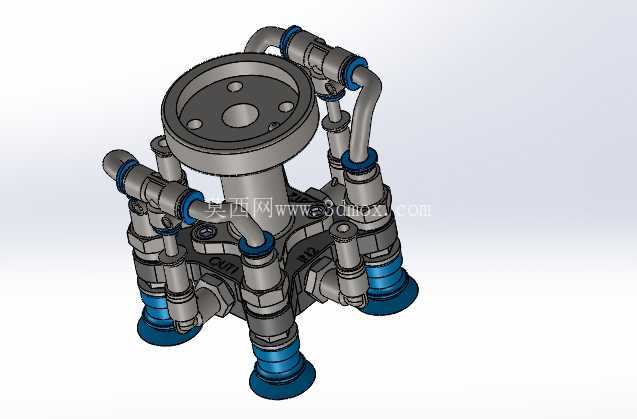
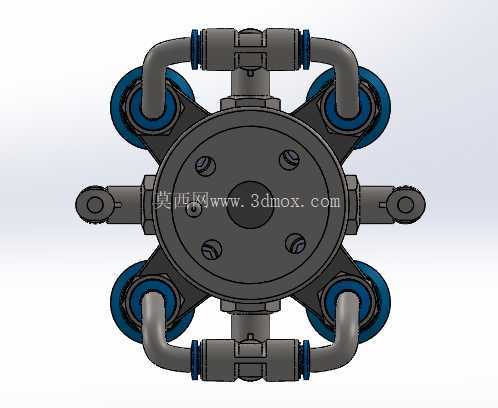
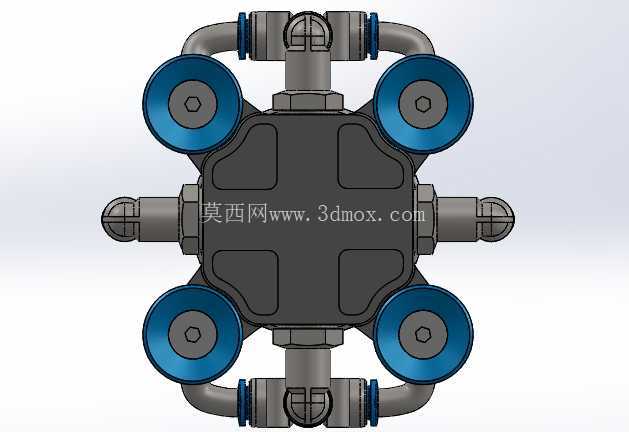
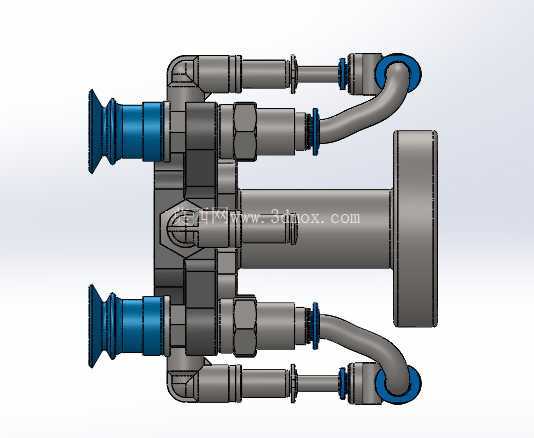
用于机器人操作的真空夹具
该项目展示了一种专为机器人操作应用而设计的真空夹具。 该模型的开发重点关注参数化设计、紧凑集成和可制造性。夹具使用基于真空的吸力进行物体处理,并按照 DFM 原则进行设计,以确保可靠的制造和组装。 该设计适用于拾放操作以及集成到工业或研究机器人系统中。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,Other

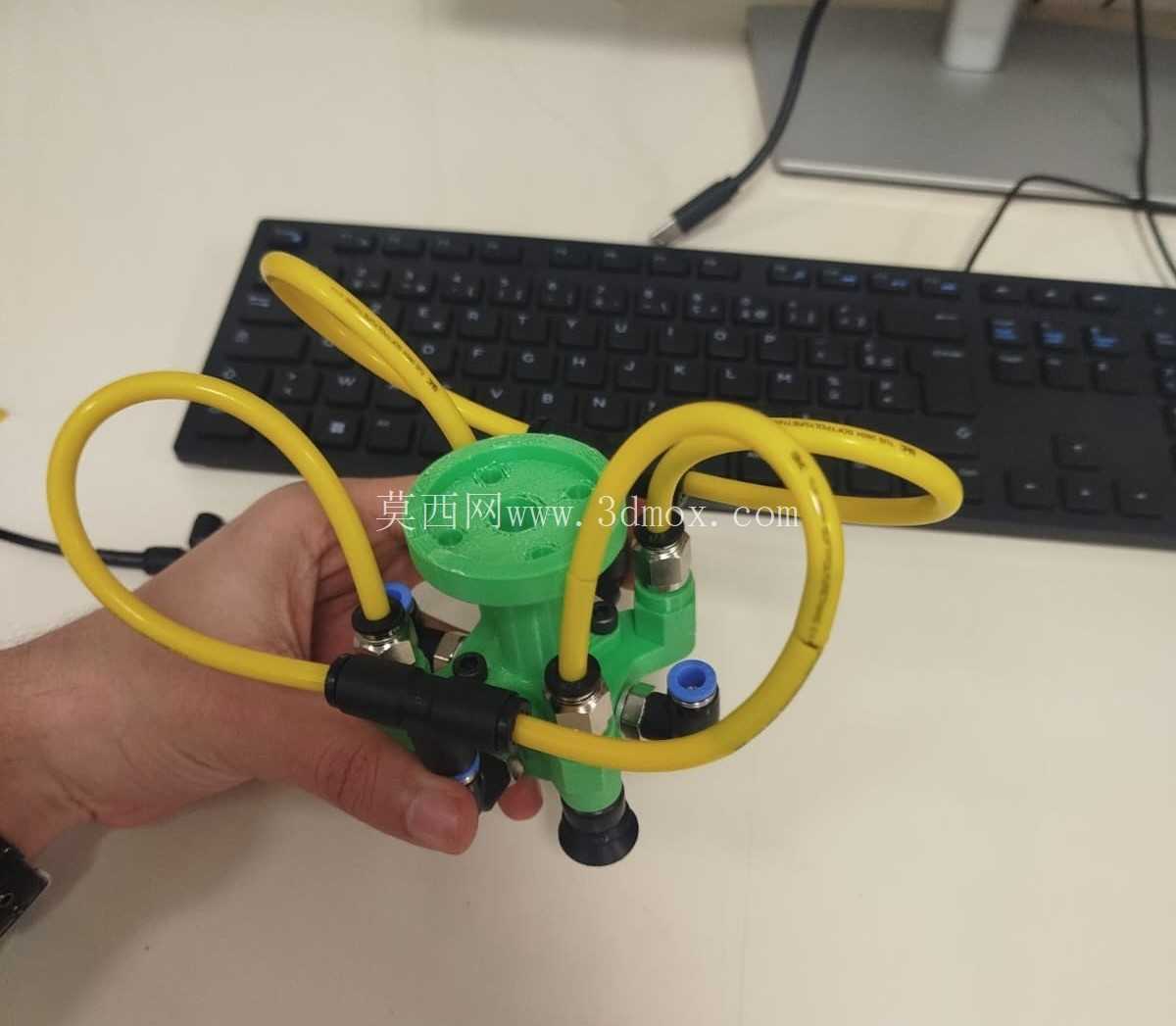
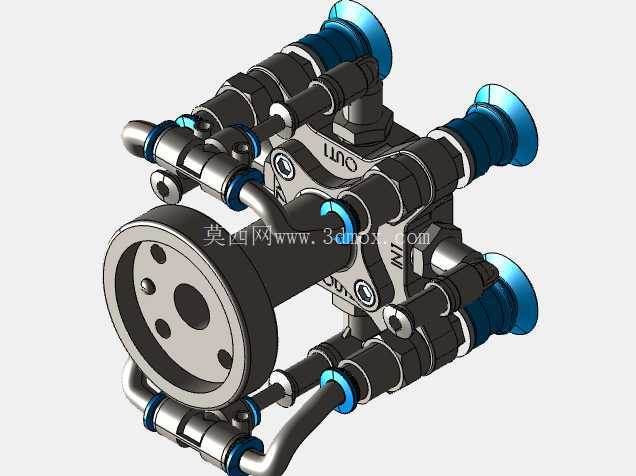
该项目展示了一种专为机器人操作应用而设计的真空夹具。 该模型的开发重点关注参数化设计、紧凑集成和可制造性。夹具使用基于真空的吸力进行物体处理,并按照 DFM 原则进行设计,以确保可靠的制造和组装。 该设计适用于拾放操作以及集成到工业或研究机器人系统中。


















